
ARMAR-6
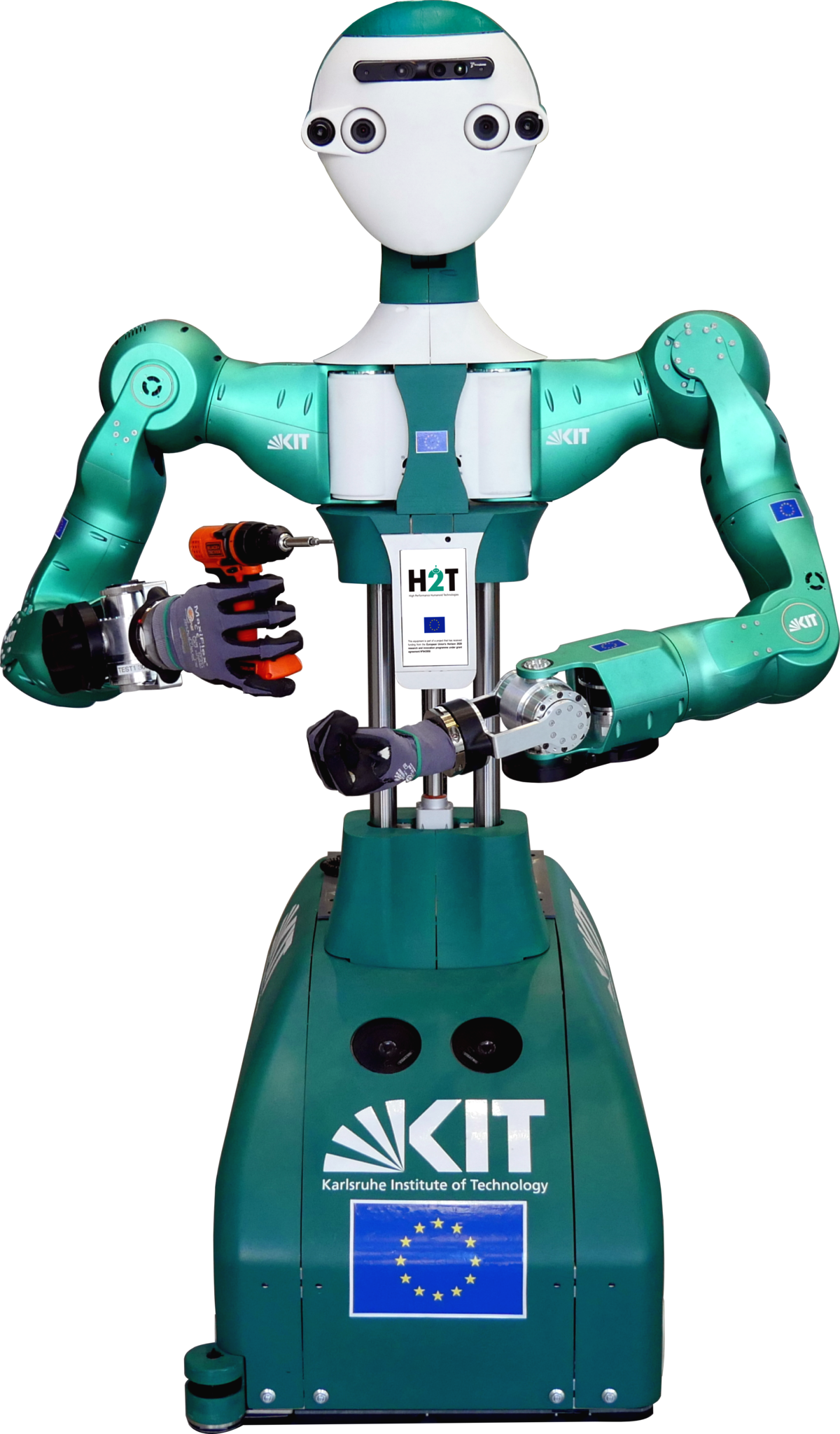
ARMAR-6 ist ein humanoider Assistenzroboter für industrielle Umgebungen, der mit Menschen interagiert und sie proaktiv unterstützt. Mit seinem menschenähnlichen Körper kann er für den Menschen geschaffene Werkzeuge wie Bohrmaschinen oder Hammer verwenden. Seine künstliche Intelligenz erlaubt es ihm, selbständig Aufgaben im Kontext der Wartung industrieller Anlagen zu übernehmen, die Hilfebedürftigkeit eines menschlichen Kooperationspartners zu erkennen und seine Hilfe anzubieten. Eine große Herausforderung ist dabei, dass ARMAR-6 mit einer Fülle von möglichen Situationen konfrontiert wird, die zum Zeitpunkt seiner Programmierung nicht vorhergesehen werden können.
Vier Computer im Roboter stellen die notwendige Rechenleistung für die Algorithmen der Regelung, der Bildverarbeitung, der Interaktion sowie für die Methoden des maschinellen Lernens und der künstlichen Intelligenz bereit. Die Software-Architektur ist in ArmarX realisiert. Ein großer Akku ermöglicht den kabellosen und völlig autonomen Betrieb. Alle Gelenkantriebe in den Armen bestehen aus eigens entwickelten, robusten und gekapselten Sensor-Aktor-Controller-Einheiten, die Elektromotor, Getriebe, Sensoren, Elektronik und Regelung enthalten. Schleifringe erlauben eine kontinuierliche Rotation der Gelenke. Unterschiedliche Regelungen ermöglichen die Ausführung von präzisen und kraftgeregelten Bewegungen.
ARMAR-4
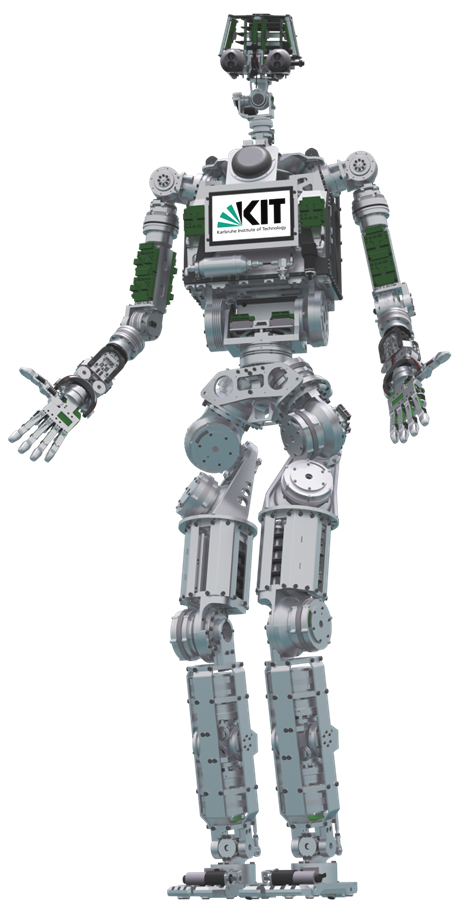
Der humanoide Roboter ARMAR-4 ist ein kraftgeregelter humanoider Roboter mit 63 aktiven Bewegungsfreiheitsgraden, 63 Aktuatoren, 214 Sensoren, 76 Mikrokontrollern, 3PCs für die Perzeption, High-Level Ansteuerung und Balancieren. Armar-4 ist 170cm gross und wiegt mit Batterien 70 kg.
Die ersten ARMAR-Generationen wurden im Rahmen des Sonderforschungsbereichs 588: Humanoid Robots - Learning and Cooperating Multimodal Robots (SFB 588) ![]() entwickelt.
entwickelt.
ARMAR-III
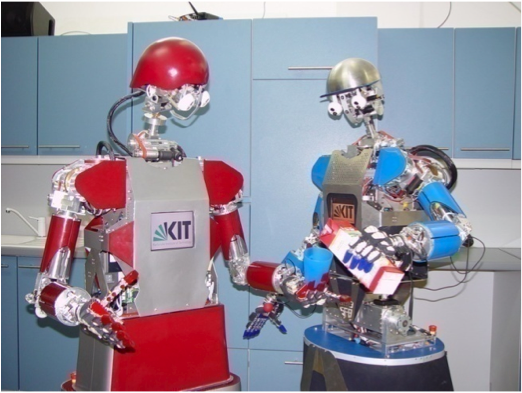

Bei der Planung von ARMAR-IIIa im Jahr 2006 stand die Nachempfindung der sensorischen und sensormotorischen Fähigkeiten des Menschen im Vordergrund. Der Roboter sollte in der Lage sein in einem gewöhnlichen Haushalt zu agieren und dem Menschen bei seiner alltäglichen Arbeit zu unterstützen. ARMAR-IIIa hat 43 DoFs und ist ausgestattet mit Poisitions-, Geschwindigkeits- und Kraftsensoren. Der Oberkörper wurde modular konstruiert und orientiert sich von seinen Ausmaßen an einer durchschnittlichen Person. Zur Forbewegung dient eine holomische, mobile Plattform. Zwei Jahre später wurde der leicht verbesserte humanoide Roboter ARMAR-IIIb gebaut.
ARMAR-I und ARMAR-II
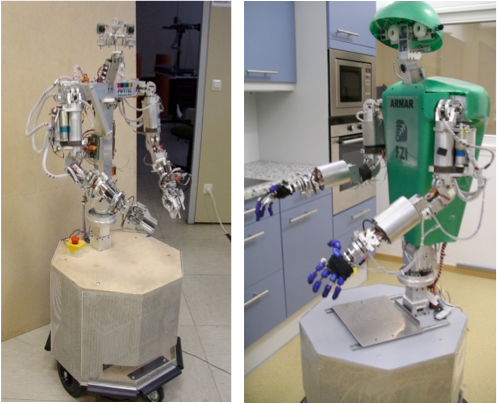
Im Jahr 2000 wurde die erste Version von ARMAR gebaut, der 25 mechanische Freiheitsgrade (DoFs) besitzt. Der Roboter besteht aus einer autonomen mobilen Plattform, einem Torso mit 4 DoFs, zwei anthropomorphe Arme mit jeweils 7 DoFs, zwei einfachen Greifern und einem Kopf mit 3 DoFs.
Die zweite Version von ARMAR entstand 2002 und trug den Namen ARMAR-II. Dieser Roboter besteht ebenfalls aus einer autonomen Plattform, einem Torso mit 4 DoFs, zwei Armen mit 7 DoFs und einer Länge von 65 cm bestückt mit einfachen Greifern sowie einem Kopf mit einem Stereokamerasystem. Der anthropomorphe Torso des Roboters ist auf einer mobilen Plattform montiert und unterstützt eine Rotation von 330 Grad. Überdies ist der Roboter in der Lage sich vor-, seitwärts- und zurück zu beugen. Da der Roboter in enger Kooperation mit dem Menschen atrbeiten soll, wurden die Arme dem menschlichen Vorbild nachempfunden.
Der Karlsuher Humanoide Kopf
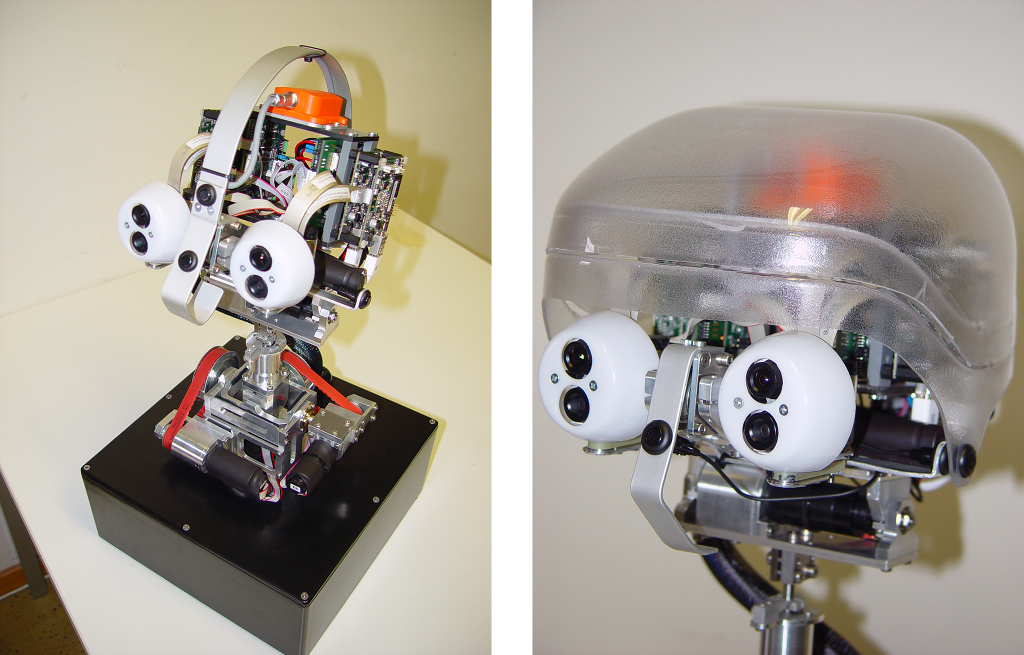
Der Karlsruher Kopf wurde durchgehend in ARMAR-IIIa und -IIIb verwendet. Dieser besitzt zwei Kameras pro Auge, damit der Roboter für Weit- und Nahsicht. Des Weiteren besitzt der Kopf 7 DoFs (4 DoFs im Nacken und 3 DoFs für die Augen), 6 Mikrophone und einen 6D Intertiualsensor. In Europa sind bereits 10 Köpfe an verscheidenen Forschungseinrichtungen im Betrieb.