
ARMAR-6
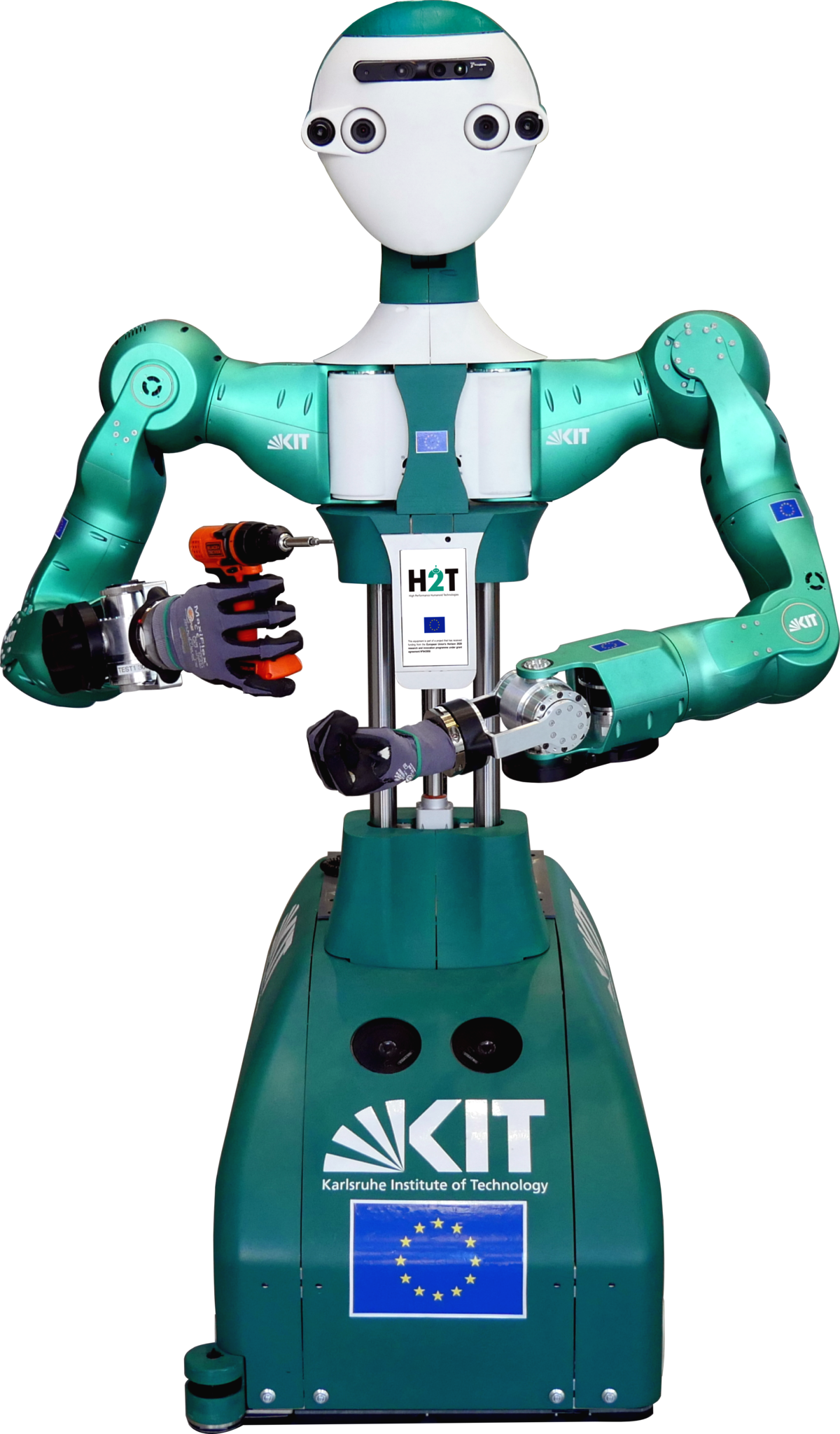
ARMAR-6 is a collaborative humanoid assistant robot for industrial environments. It can interact with humans and provide help when needed in a proactive way. Thanks to its humanoid shape, it can use tools designed for humans, such as power drills and hammers. With its artificial intelligence capabilities, it can autonomously perform maintenance tasks in industrial facilities, recognize the need of help of its collaboration partner, and offer assistance. The robot has been designed to be versatile in its capabilities to allow acting in situations that are not foreseen at programming time.
Four computers in the mobile base of the robot provide the computation power required for control, image processing, and interaction algorithms as well as for machine learning and artificial intelligence methods. The software architecture is implemented in ArmarX. A battery allows for cable-free, completely autonomous operation. All joint actuators in the arms consist of specially developed, robust, encapsulated sensor-actuator-controller units containing an electric motor, reduction gear, sensors, electronics and controllers. Slip rings allow for the continuous rotation of the joints. Various control modes enable the execution of precise and force-controlled motions.
ARMAR-4
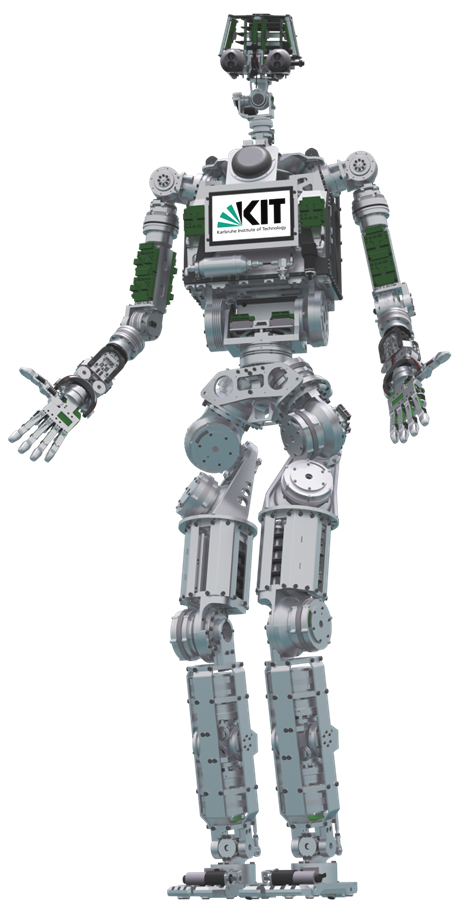
The humanoid robot ARMAR-4 is a full body torque controlled humanoid robot with 63 active degrees of freedom, 63 actuators, 214 sensors, 76 microcontroller for low-level control, 3 PCs for perception, high-level control and balancing, a weight of 70 kg including batteries and total height of 170 cm.
The first generations of the ARMAR humanoid robots have been developed within the Collaborative Research Center 588: Humanoid Robots - Learning and Cooperating Multimodal Robots (SFB 588) ![]() .
.
ARMAR-III
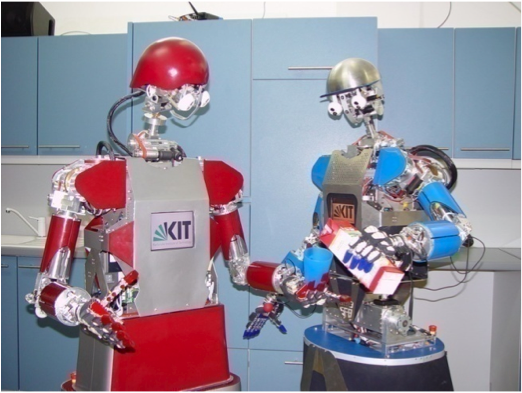

In the design of our robot ARMAR-IIIa in 2006, we desired a humanoid that closely mimics the sensory and sensorimotor capabilities of the human. The robot should be able to deal with household environments and the wide variety of objects and activities encountered in it. ARMAR-IIIa is a fully integrated autonomous humanoid system. It has a total 43 DOFs and is equiped with position, velocity and force-torque sensors. The upper body has been designed to be modular and light-weight while retaining similar size and proportion as an average person. For the locomotion, we employed a mobile platform which allows for holonomic movability in the application area. Two years later, a slightly improved humanoid robot, ARMAR-IIIb, was engineered.
ARMAR-I und ARMAR-II
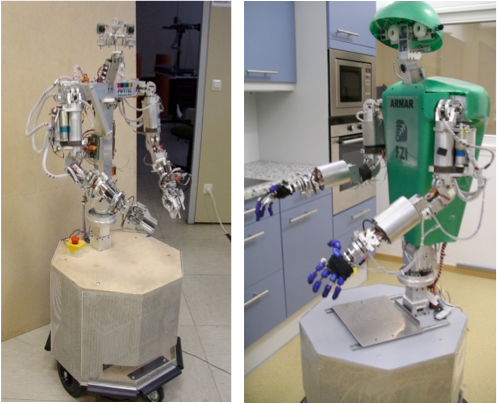
In the year 2000, the first humanoid robot in Karlsruhe was built and named ARMAR. This humanoid had twenty-five mechanical degrees-of-freedom (DOF). It consisted of an autonomous mobile wheel-driven platform, a body with 4 DOFs, two anthropomorphic redundant arms each having 7 DOFs, two simple gripper and a head with 3 DOFs.
In 2002, the second version of the ARMAR series, namely ARMAR-II, was built. Mechanically, this robot consisted of an autonomous mobile wheel-driven platform, a body with 4 DOFs, a two arm system with a simple gripper and a stereo camera head. The anthropomorphic body of the robot was placed on a mobile platform and supported a rotation of about 330 degrees. It also was able to bend forward, backward and sideward.
Since the robot should support a simple and direct cooperation with humans, the physical structure (dimension, shape and kinematics) of each arm was developed as close as possible to the human arm in terms of segment lengths, axis of rotation and workspace. Furthermore, ARMAR-II had two redundant arms each having 7 DOFs and a length of 65 cm.
Der Karlsuher Humanoide Kopf
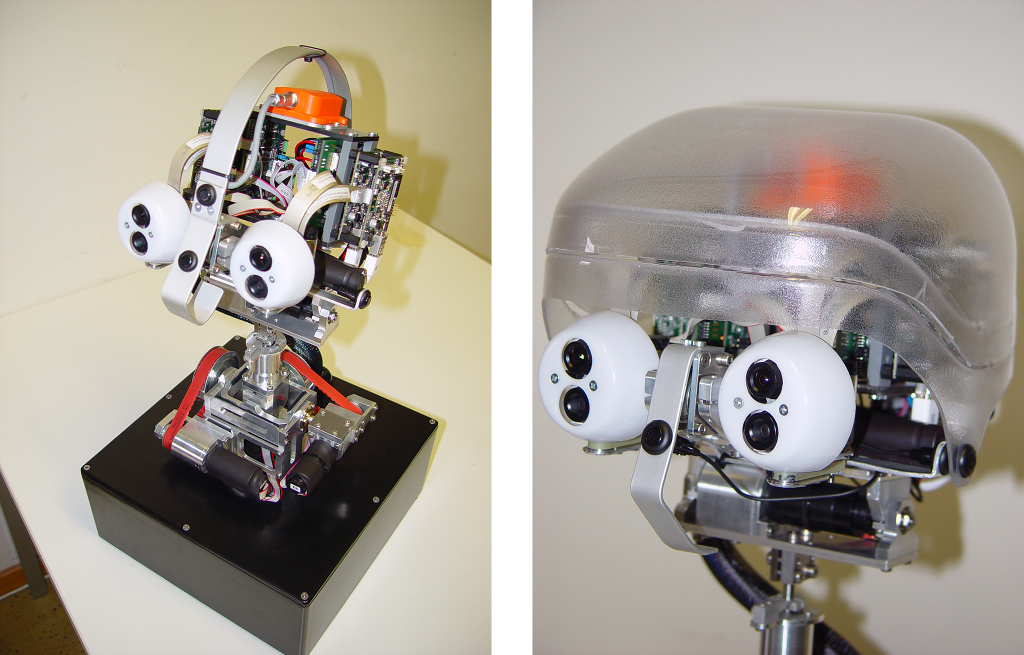
The Karlsruhe humanoid head was consistently used in ARMAR-IIIa, ARMAR-IIIb, and ARMAR-4. Each possesses two cameras per eye with a wide-angle lens for peripheral vision and a narrow-angle lens for foveated vision. It has a total number of 7 DOFs (4 in the neck and 3 in the eyes), six microphones and a 6D inertial sensor. Throughout Europe, there are already ten copies of this head in use.