
Selbstexploration und Körpermodell
Selbstkalibrierung und Werkzeugnutzung
Der Aufbau moderner Roboter ist in der jüngeren Vergangenheit zunehmend komplexer geworden. Dies lässt sich unter Anderem durch leistungsfähigere Rechner und hochentwickelte Kontrollalgorithmen erklären. Gerade Humanoide Roboter, die bedingt durch die Ähnlichkeit zum Menschen über eine große Anzahl Freiheitsgrade verfügen, sind daher auf aufwändige und zeitintensive Kalibriervorgänge angewiesen, die eine schnelle Anpassung an eine veränderte Struktur unmöglich machen. Jedoch ist besonders der dynamische Einsatz von Werkzeugen eine Eigenschaft die einen Einsatz in menschlichen Umgebungen ermöglicht. Um eine schnellere und autonome Anpassung zu ermöglichen sind daher Techniken aus dem Feld des maschinellen Lernens in das Interesse der Forschung gerückt.
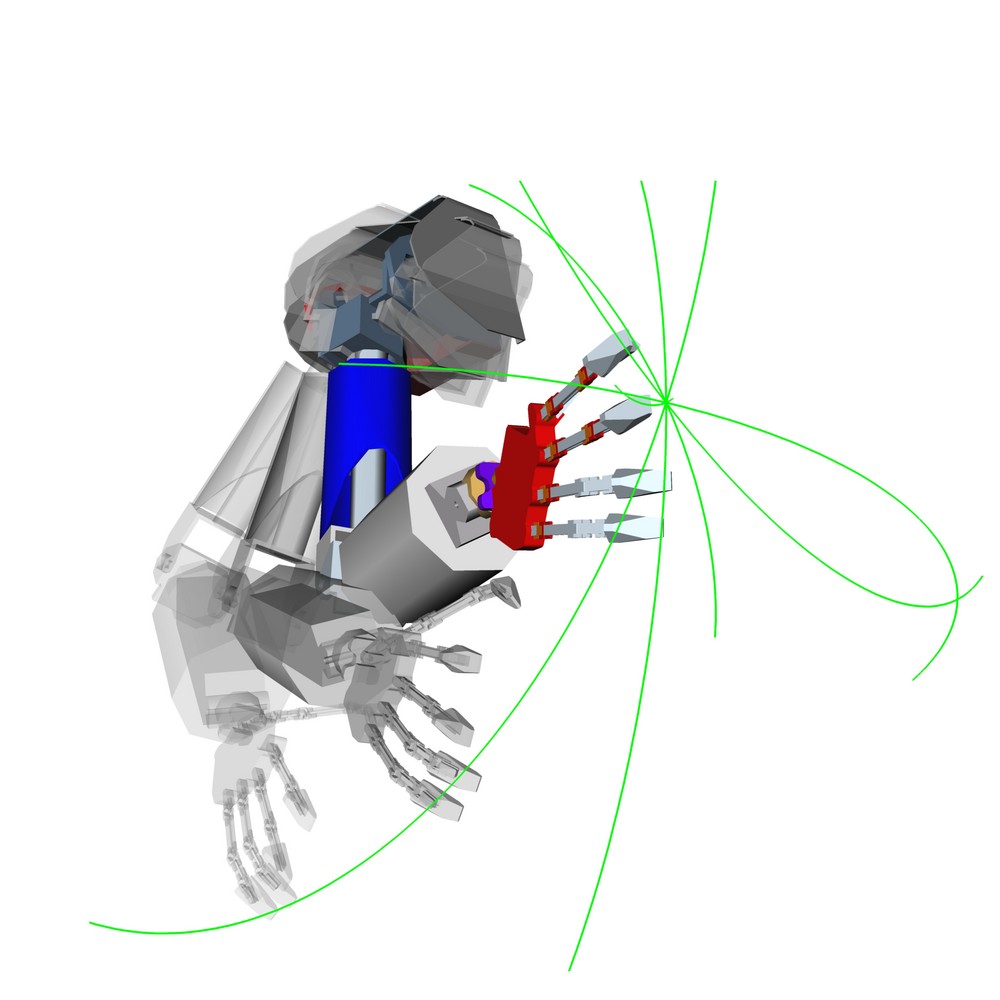
Selbstexploration und das Körperschema
Die Hand-Auge-Koordination ist mit traditionellen Mitteln oftmals ein sehr schwieriger Prozess. Der Mensch jedoch vermag dieses Problem einzig durch Selbstexploration zu lösen, was zu der Verwendung biologisch motivierter Algorithmen in der Robotik geführt hat. Den Neurowissenschaften ist die Existenz des so genannten "Körperschemas" bekannt, das sensorische Eindrücke, wie zum Beispiel die Gelenkstellungen (Propriozeption) und die sichtbaren Gestalt des Körpers, vereint. Somit stellt es eine unbewusste Darstellung des Körpers und dessen momentanen Zustands dar.
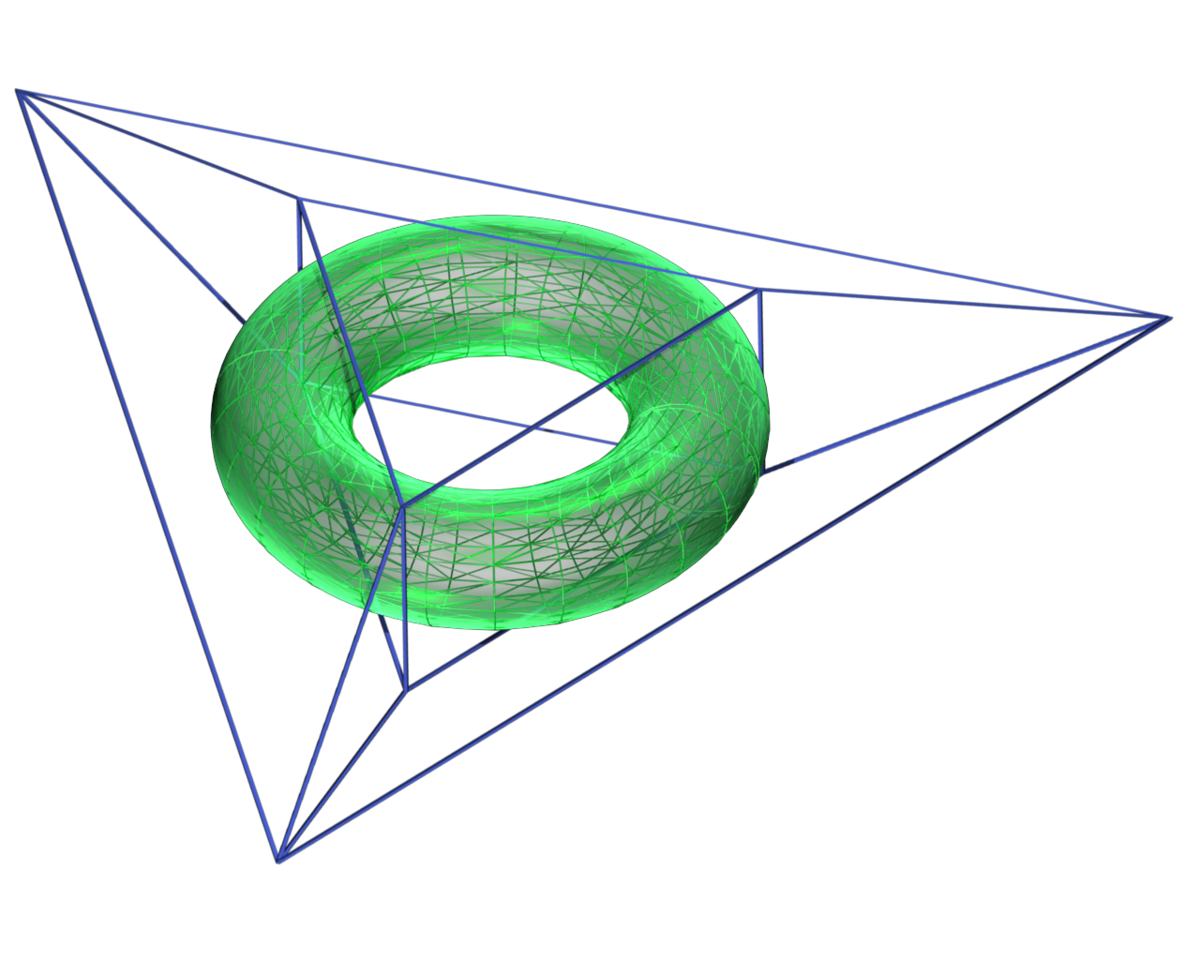
Das Erlernen des Körperschemas
Auf technischer Seite liegt das Problem in der Tatsache, dass dessen mathematische Repräsentation nichtlineare Funktionen mit vielen unabhängigen Variablen benötigt. Die Konsequenz ist die große Menge von notwendigen Trainingsbeispielen (entspricht Bewegungen des Roboters), die exponentiell mit Anzahl der unabhängigen Freiheitsgraden wächst. Jedoch lässt sich dieser Bedarf durch die Hinzunahme von geeignetem Vorwissen auf ein Minimum reduzieren. Dazu wird eine auf dieses Problem abgestimmte Lernmethode entwickelt, die Gebrauch von Techniken aus der computergestützten Geometrie macht. Durch die Kinematic Bézier Maps (KBM) (kinematische Bézierfunktionen) kann diese komplizierte Aufgabe auf ein hochdimensionales, aber lineares Optimierungsproblem reduziert werden. In Kombination mit Dekompositionstechniken, die eine weitere Beschleunigung des Lernvorgangs ermöglichen, wird so die Umsetzung eines adaptiven Körperschemas für humanoide Roboter möglich.