
Sensor-Aktor-Controller Einheiten (SAC units)

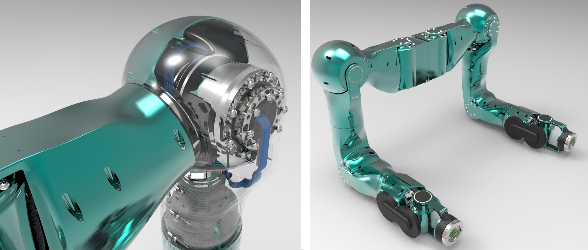
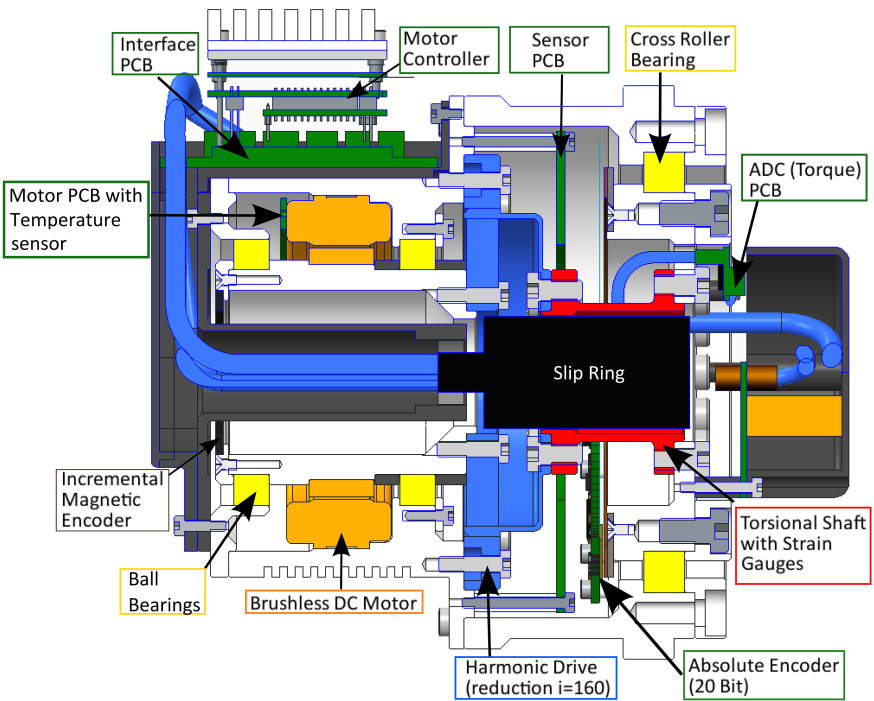
Unsere hochintegrierten Sensor-Aktor-Controller-Einheiten (SAC-Einheiten) für Robotergelenke berücksichtigen den steigenden Bedarf an einfach zu verwendenden Komponenten für die Konstruktion moderner Hochleistungs-Robotersysteme. Jede SAC-Einheit beinhaltet einen Motor, ein Getriebe, eine IMU, Sensoren zur Messung des Drehmoments, der Position und Temperatur sowie alle notwendige eingebettete Elektronik zur Regelung und Kommunikation über einen schnellen ETHERCAT-Bus. Wichtige Designaspekte waren leicht nutzbare Schnittstellen und eine robuste Verkabelung. Durch die Nutzung von Schleifringen zur elektrischen Verbindungen des An- und Abtriebs ist es möglich die Einheiten kontinuierlich zu drehen, selbst, wenn sie als Teil eines Roboterarms miteinander verbunden sind.
Um für ARMAR-6 ein Zweiarmsystem mit einer Nutzlast von 10 kg pro Arm zu realisieren, haben wir einen Exoskelett-Design-Ansatz verfolgt, der SAC-Einheiten in drei Größen beinhaltet: Die ersten drei Schultergelenke werden durch große SAC-Einheiten mit einer Drehmomentkapazität von 176 Nm angetrieben, der Ellenbogen und seine angrenzenden Gelenke durch mittelgroße Einheiten mit 123 Nm und die Handgelenke durch kleine Einheiten mit 64 Nm.
Universal Controller Module (UCoM)
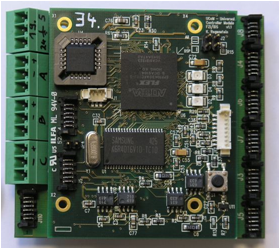
Für die sensormotorische Regelung des Roboters wurden das Universal Controller Module (UCoM) entwickelt. Verschiedene Elektromotoren können flexibel an das Modul angeschlossen und entsprechend angesteuert werden. Mit dem 3-Way-Brushdriver-Board ist es möglich bis zu 3 DC Motoren mit 24 V und 5A durch ein UCoM zu regeln. Die UCoMs sind ausgestattet mit einer DSP und einem FPGA, der Daten verarbeitet und die DSP mit einer großen Anzahl von IOs versorgt. Besonderes Augenmerk bei der Entwicklung der UCoMs wurde auf die kleine Bauform als auch dem niedrigen Energieverbrauch gelegt. Für die Kommunikation zwischen den verschiedenen Komponenten eines Robotersystems wird der CAN-Bus unterstützt. Des Weiteren können unterschiedliche Programme für die Konfiguration der Module geladen werden. Sie bieten somit die Basis für die Regelung verschiedenster Komponenten eines humanoiden Roboters.