
Roboterhände und Handprothesen
Inspiriert vom intelligenten Mechanismus der TUAT/Karlsruhe Hand entwickeln wir ein breites Spektrum unteraktuierter, humanoider Hände für Robotik und Prothetik. Neben der mechanischen Adaptivität stehen dabei vor allem der hohe Integrationsgrad und die Sensorisierung im Vordergrund. Gemeinsam mit der menschlichen Form und Kinematik der Hände gewährleisten diese umfassende Greiffähigkeiten und damit eine universelle Einsetzbarkeit.
Die TUAT/Karlsruher Humanoide Hand
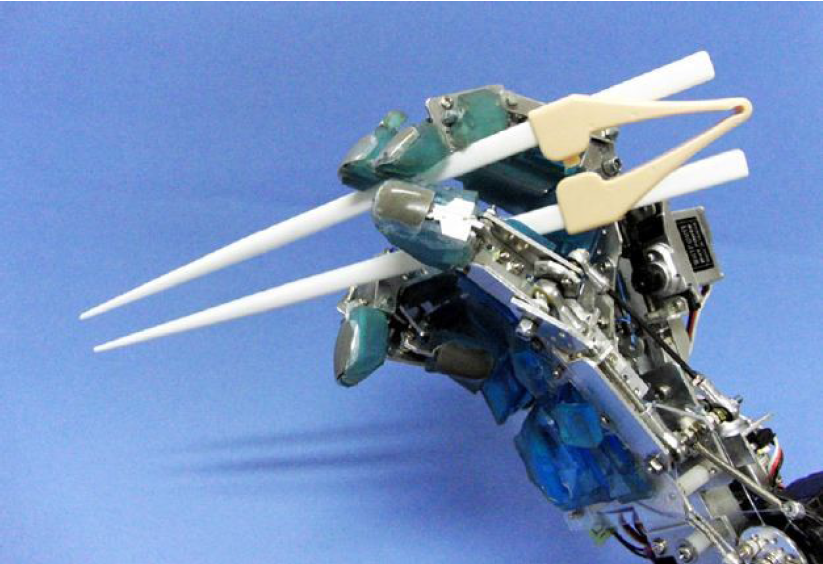
Die erste Version der TUAT/Karlsruher Humanoide Hand wurde im Jahr 2000 entwickelt. Sie umfasste 20 DoF, welche mit einem Akuator zentral angesteuert werden. Die zweite Version wurde 2013 vorgestellt und ermöglicht mit Hilfe der 24 DoF und zusätzlicher Aktuatoren in den Fingern komplexere Greif- und Manipulationsbewegungen.
KIT ARMAR Hand

Für die Arbeit in einer menschenzentrierten Umgebung ist unser Roboter ARMAR-6 mit zwei Händen ausgestattet. Deren auf menschlichen Proportionen basierende Kinematik ermöglicht die Verwendung von Werkzeugen, die für den Menschen gemacht sind. Jedes der 14 Fingergelenke (zwei im Daumen und drei pro Finger) ist kugelgelagert und durch Seilzüge aktuiert.
Ebenso wie bei der KIT Prosthetic Hand werden Daumen und Finger von jeweils einem Motor angetrieben. Die Kraftverteilung über einen adaptiven, unteraktuierten Mechanismus erlaubt das unabhängige Schließen jedes einzelnen Gelenks und Fingers. Die Roboterhand ist 30% größer als das 50. Perzentil männlicher Hände, sodass die Integration größerer, leistungsstärkerer Motoren möglich ist.
Da die Hände vor allem für Wartungsaufgaben zum Heben schwerer Objekte genutzt werden, müssen sie gleichzeitig robust und leicht sein. Daher sind die meisten Strukturteile in einem 3D-Druck-Verfahren hergestellt. Alle Kabel sind durch eine Abdeckung geschützt. Zudem trägt die Hand in einen Schutzhandschuh.
KIT Prosthetic Hand

Bei Handprothesen spielt neben der Funktionalität auch das Aussehen der Prothese (Größe und Ähnlichkeit zum natürlichen Vorbild) eine besonders wichtige Rolle. Mit der KIT Prosthetic Hand entwickeln wir eine neuartige Generation personalisierter High-End Handprothesen. Diese basieren auf intelligenten, unteraktuierten Mechanismen und vereinfachen die Komplexität der Handsteuerung zur Realisierung von Griffen. Im Verlauf der bisherigen Entwicklung sind zwei Versionen der KIT Prosthetic Hand in den Größen des 50. Perzentils männlicher und weiblicher Hände entstanden. Das Gehäuse der Prothesen besteht aus Teilen, die vollständig mittels eines 3D-Druck-Verfahrens gefertigt wurden.
Innerhalb der Hand ist neben zwei Motoren und einem unteraktuierten Mechanismus auch die vollständig eigenständige Mechatronik der Handprothesen untergebracht. Die Hände verfügen über eine Farbkamera in der Handinnenfläche sowie ein OLED-Display auf dem Handrücken. Die Finger weisen ein Schließverhalten entsprechend der menschlichen Fingertrajektorie auf.
Die KIT Prosthetic Hand weist eine universelle Greiffähigkeit auf, welche mit Objekten aus Haushalt und Werkstatt evaluiert wurde. Sie hat eine Griffkraft von 120 N im Koffergriff und 24,2 N bei einem zylindrischen Griff. Das vollständige Schließen der Prothese erfolgt in 1,2 Sekunden.