
Aufnahme und Erkennung menschlicher Bewegungen
Markerlose Erfassung
Markerlose Erfassung der Bewegungen eines Menschen ist Voraussetzung für das Imitationslernen sowie für die Mensch-Roboter-Interaktion. Unsere Forschung konzentriert sich auf echtzeitfähige Stereo-basierte Verfahren, unter Verwendung des Stereokamerasystems typischer humanoider Roboterköpfe, bei denen der Kameraabstand in etwa dem Augenabstand beim Menschen entspricht. Als statistischer Schätzer wird ein Partikelfilter eingesetzt.
Die unten aufgeführten Publikationen illustrieren die Entwicklung und Fortschritte unseres Ansatzes, beginnend mit einem monokularen Ansatz, anschließender Einführung von 3D Hand/Kopf-Tracking als separate Informationsquelle, und in unseren neuesten Arbeit unter Einbezug der inversen Kinematik, adaptiven Schulterpositionen um mehr Flexibilität des Modells zu erlauben und einem Priorisierungsschema zur kooperativen Fusion innerhalb des Partikelfilters. Mit dem aktuellen System können 3D-Bewegungen eines Menschen mit dem Kopf des humanoiden Roboters ARMAR-III in Echtzeit mit einer Verarbeitungsrate von 20 Hz unter Verwendung herkömmlicher Hardware erfasst werden. Die erfassten Trajektorien werden für die online Reproduktion und Imitation verwendet.
Markerbasierte Verfahren (Vicon)
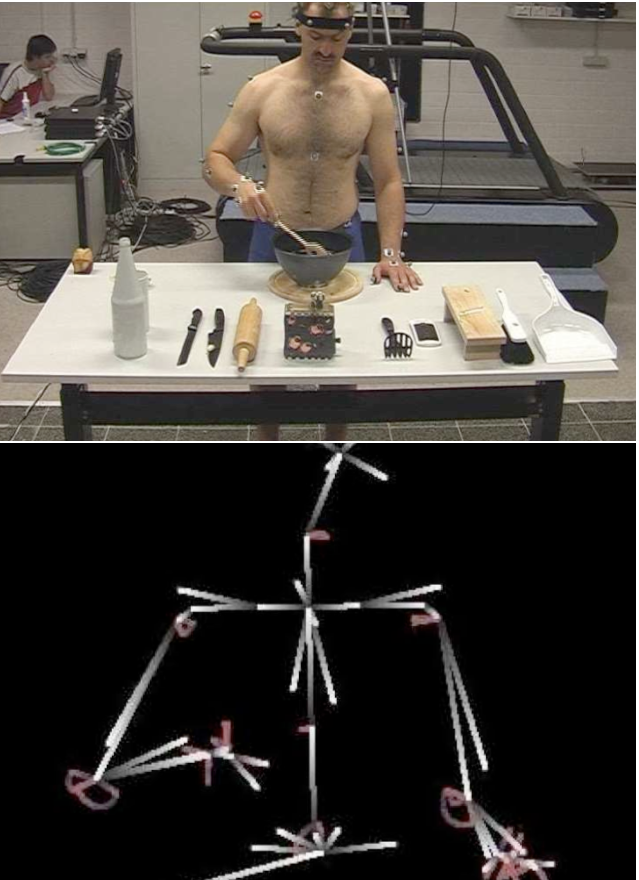
Markerbasierte Systeme zur Bewegungserfassung des menschlichen Körpers eignen sich hervorragend zur Bewegungsanalyse, zur Evaluation von Methoden sowie zur Generierung von Trainings- und Testdaten zum Einlernen von Bewegungen und Aktionen. Für unsere Forschungsaktivitäten wird ein System der Firma Vicon eingesetzt, einer der führenden Anbieter im Bereich der kommerziellen, markerbasierten Erfassungssysteme. Unser Aufbau besteht aus acht Infrarot-Kameras, welche um ein zu beobachtendes Volumen platziert werden. Für die Erfassung des Menschen werden an dessen Körper an vordefinierten Positionen reflektierende Marker angebracht. Von den Kameras wird ein pulsierendes Lichtsignal ausgestrahlt, welches von den Markern reflektiert wird. Diese Reflexion wird von den Kameras als 2D Koordinaten registriert, die zusammengefügt und gelabelt werden. Durch Triangulation erhält man die 3D Position jedes gelabelten Markers. Das Vicon System zeichnet sich durch eine exzellente Auflösung und Geschwindigkeit aus, welche es erlaubt, dass menschliche Bewegungen mit hoher Genauigkeit und hoher Frequenz aufgenommen werden können.