
Taktile Exploration

Motivation und Ziele
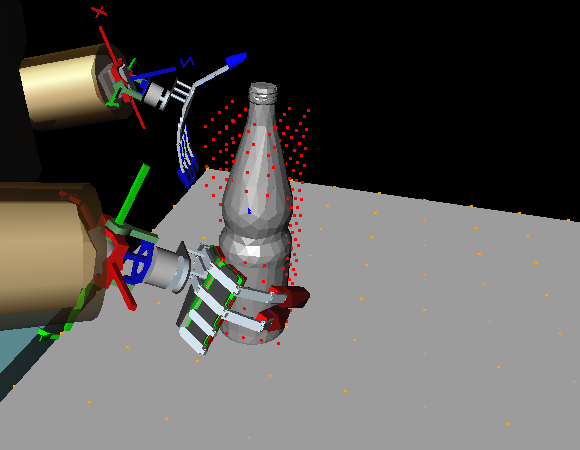
Wir haben eine taktile Explorationsstrategie entwickelt, die eine anthropomorphe Fünf-Fingerhand an der Oberfläche eines zuvor nicht bekannten Objekts entlangführt, um ein 3-D Objektmodell aus den registrierten Kontaktpunkten zu generieren. Die Strategie basiert auf der Anwendung dynamischer Potentialfelder, wie sie bisher für die Navigation mobiler Plattformen verwendet wurden. Desweiteren haben wir eine Methode entwickelt, die aus dünnen und unregelmäßigen 3-D Punktmengen, wie sie bei der taktilen Exploration entstehen, Greifhypothesen ableitet. Bei dieser Methode werden Flächen als Greifmerkmale aus der taktilen Punktmenge extrahiert. Anschließend werden Griffkandidaten in einer vierstufigen Filterpipeline validiert und ungültige Griffe eliminiert.
Objekt Repräsentationen
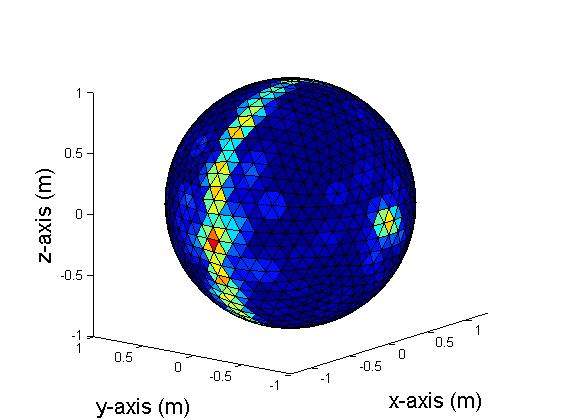
Neben dem Greifen von Objekten ist deren Erkennung durch taktile Exploration von großem Interesse. Hierfür haben wir ein Rahmenwerk zur visuo-haptischen Exploration entwickelt mit dem 3-D Punktmengen aus taktiler Exploration erfasst werden können. In einem ersten Ansatz wurden Superquadriken als geometrische Objektrepräsentation gewählt und Experimente zur Modellierung mit realen Explorationsdaten durchgeführt. In zukünftigen Arbeiten werden weitere mögliche Objektrepräsentationen wie EGIs (Extended Gaussian Images) oder Spherical Harmonic Functions untersucht, die zur Objektklassifizierung , Erkennung und Ermittlung von Greifhypothesen geeignet sind.
Simulationsumgebung
Beide zuvor beschriebenen Ansätze wurden mit dem "Inventor Physics API (IPSA)" Physik Simulator evaluiert, der speziell für die Untersuchung und Simulation von Fragestellungen aus dem Bereich der geschickten Manipulation entwickelt wurde. IPSA ist eine Erweiterung des Open Inventor Toolkits um Objekte mit physikalischen Eigenschaften. Für die Simulation der Festkörpermechanik wird die ODE Bibliothek eingesetzt. IPSA ermöglicht die einfache Beschreibung von virtuellen physikalischen Szenen durch den Benutzer.
Pneumatischer Kraft-/Positionsregler
Als weiterer Bestandteil unserer Arbeit im Bereich der Mehrfingermanipulation mit dem humanoiden Roboter ARMAR-III wurde ein Kraft-Positionsregler für eine pneumatische anthropomorphe Roboterhand entwickelt. Solche Roboterhände stellen eine vielversprechende Technologie in der Anwendung mit humanoiden Robotern, da sie sehr kompakt gebaut werden können und die Fluidik-Aktuatoren eine hohe Leistungsdichte aufweisen. Diese Aktuatoren zeichnen sich jedoch durch eine äußerst nichtlineare Systemcharakteristik aus und sind schwierig zu regeln. Unser Ansatz basiert auf einem vereinfachten Modell des Fluidik-Aktuators und ermöglicht die Kraft- und Positionsregelung, Ebenfalls erlauben die Zustandsgrößen der Regelung eine Kontakterkennung an der Fingerspitze.
Wir haben die Methode für den Mikrocontroller der FRH-4 Roboterhand implementiert. Diese Hand hat etwa die Größe einer menschlichen Hand und verfügt über 8 Freiheitsgrade. Die Hand ist an dem Roboter ARMAR-III angebracht und wird dort im kraftgeregelten Betrieb eingesetzt. In aktuellen Versuchen wird die geregelte Hand eingesetzt um aus den erfassten Druck- und Positionsmesswerten der Hand während der Exploration auf globale haptische Eigenschaften, wie Objektgröße und Verformbarkeit zu schließen.