
Motivation und Ziele
Um mit einem autonomen Roboter Aktionen auszuführen, werden Algorithmen benötigt um kollisionsfreie Bewegungen in einer dynamischen Umgebung schnell und zuverlässig planen zu können. Basierend auf randomisierten Ansätzen, wie beispielsweise den Rapidly-exploring Random Trees (RRT), entwickeln wir Algorithmen zur kollisionsfreien Bewegungsplanung für ein- und zweiarmige Greif- und Manipulationsaufgaben. Weiterhin werden integrierte Algorithmen zur Greif- und Bewegungsplanung untersucht, die es ermöglichen, während der Planung von Bewegungen im Konfigurationsraum geeignete Greifhypothesen zu ermitteln.
Kollisionserkennung und Bewegungsplanung
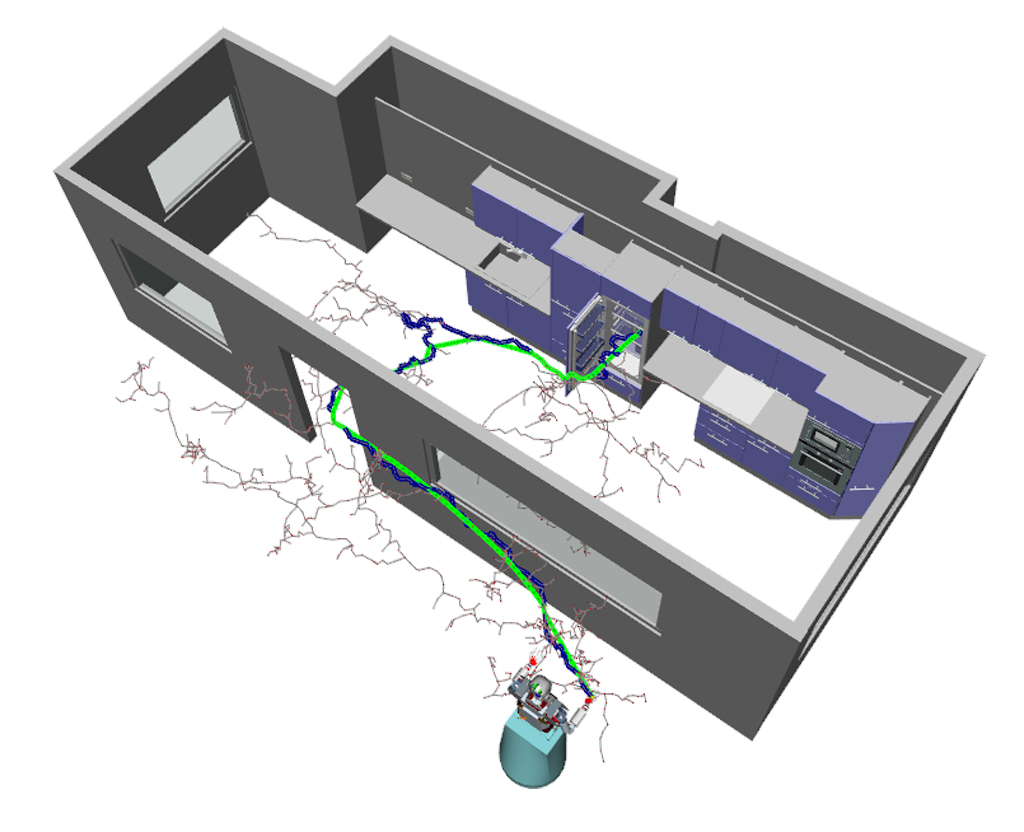
Humanoide Roboter, welche in menschenzentrierter Umgebung eingesetzt werden, benötigen eine Komponente, um kollisionsfreie Bewegungen schnell und robust planen zu können. Basierend auf den Rapidly-exploring Random Trees (RRT) werden angepasste Algorithmen entwickelt, um Greif- und Manipulationsbewegungen effizient planen zu können. Die hierzu entwickelten Bibliotheken zur Robotersimulation, Kollisionserkennung und Bewegungsplanung werden auf dem humanoiden Roboter ARMAR-III, welcher im Rahmen des Sonderforschungsbereichs 588 entwickelt wird, vollständig integriert und evaluiert. Die Nutzung vereinfachter 3D Modelle des Roboters und der Umgebung ermöglicht eine performante Durchführung von Kollisionserkennung und Abstandsberechnungen, so dass Greiftrajektorien effizient mit RRT-Methoden geplant werden können.
Um, trotz sampling-basierter Algorithmen, garantiert kollisionsfreie Trajektorien planen zu können werden vergrößerte Robotermodelle und Algorithmen zur nachträgliche Validierung genutzt. Da für die so bestimmten Trajektorien eine Garantie gegeben werden kann, dass kein Kontakt mit der Umwelt auftritt, können hierdurch sensitive Trajektorien geplant werden.
Ganzkörpertrajektorien können mit dem Adaptiven RRT-Planer schnell und zuverlässig ermittelt werden, so dass mit ARMAR-III Greif-Trajektorien für 19 Freiheitsgrade der Subsysteme Plattform, Hüfte, Oberarm, Unterarm, und Hand robust berechnet werden können.
IK-RRT: Sampling des Lösungsraums während der Planung
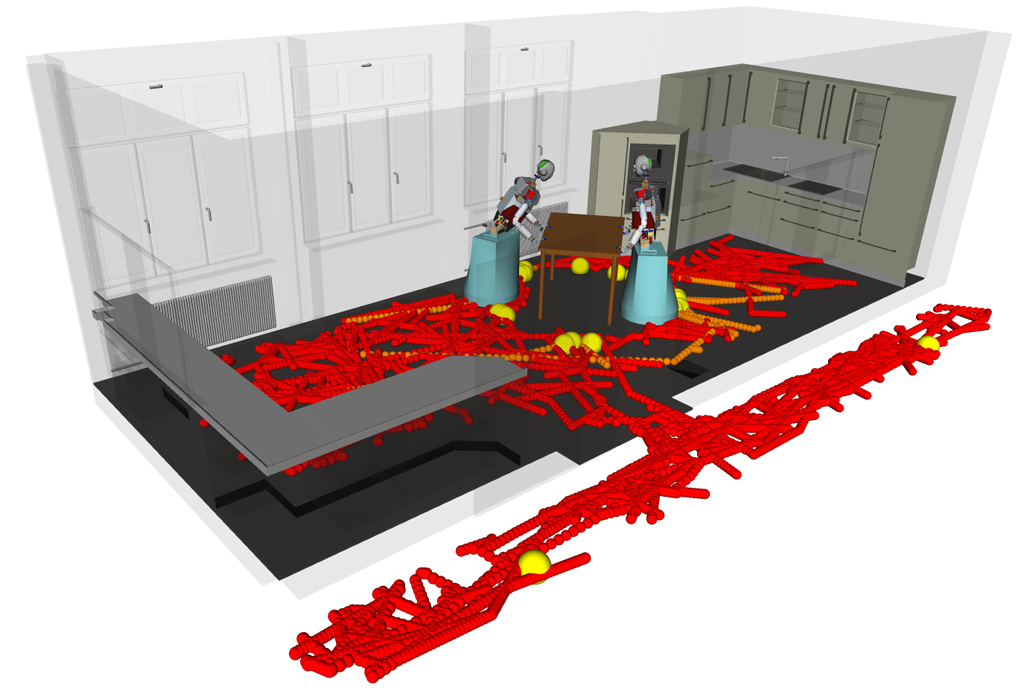
Eine typische Aufgabe für einen humanoiden Roboter besteht aus den Aktionen Greifen und Überbringen eines Objektes. Für solche Aktionen wird eine kollisionsfreie Greiftrajektorie zu einem Ziel im Konfigurationsraum geplant. Diese Zielkonfiguration kann durch Lösen der inversen Kinematik (IK) ermittelt werden, allerdings wird somit der mögliche Lösungsraum eingeschränkt, da die Redundanz des Systems i.A. nicht durch eine Zielkonfiguration abgedeckt wird. Weiterhin können für ein Objekt mehrere Greifmöglichkeiten existieren, wobei die Festlegung auf einen speziellen Griff wiederum den Lösungsraum unnötig einschränkt. Um in solchen Situationen den kompletten Lösungsraum für die Planung nutzen zu können, wurden die probabilistisch vollständigen Planer J+-RRT und IK-RRT entwickelt, welche zusätzlich zur Planung der Trajektorie einen erreichbaren Griff sowie eine Lösung der inversen Kinematik bestimmen. Der J+-RRT Algorithmus benötigt hierbei keinen Algorithmus zur Lösung des IK-Problems, wohingegen der IK-RRT Ansatz einen IK-Löser in das Planungskonzept integriert, wodurch eine effizientere, da bidirektional umgesetzte, Suche realisiert werden kann.
Falls beide Hände eines humanoiden Roboters zum Greifen zur Verfügung stehen, kann der Multi-EEF-Planer eingesetzt werden. Dieser Ansatz trifft implizit die Entscheidung, welche Hand zum Greifen benutzt werden soll, indem eine parallelisierte Planung für beide Arme durchgeführt wird.
Planung von zweiarmigen Greif- und Umgreifbewegungen
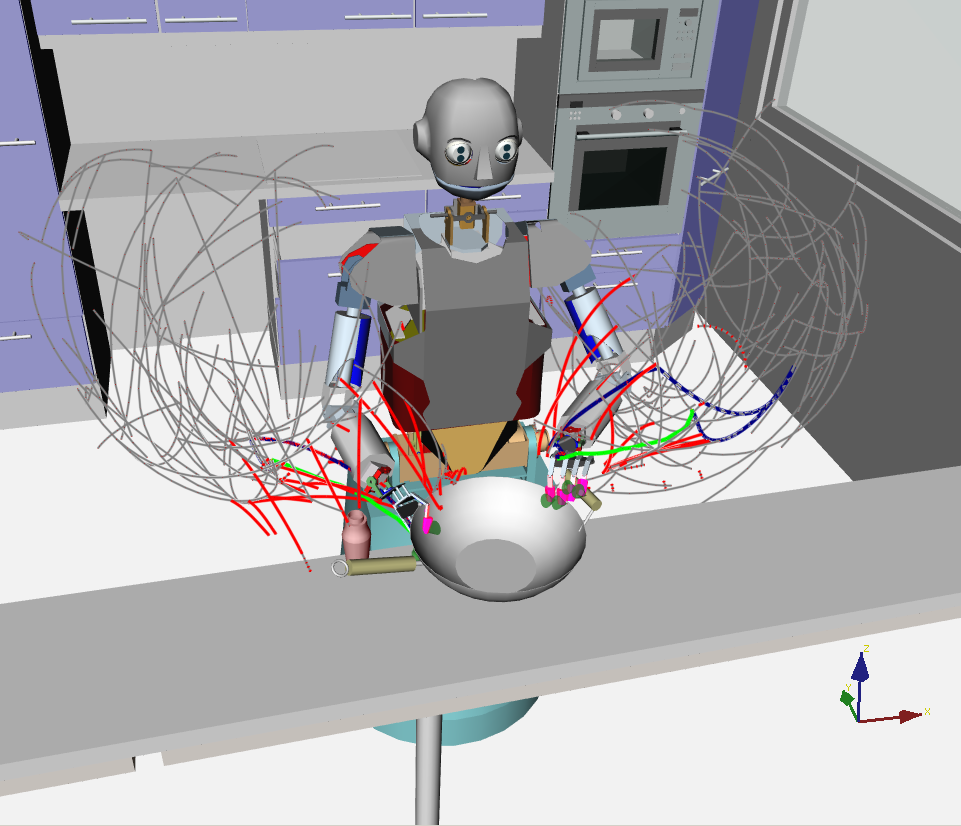
Falls beide Arme eines humanoide Roboters zum Greifen, Manipulieren oder Umgreifen benötigt werden, kommen Erweiterungen der IK-RRT-Ansätze zum Einsatz, welche eine effiziente Planung in hochdimensionalen Konfigurationsräumen ermöglichen. Hierbei kommen angepasste Algorithmen zum Lösen der zweihändigen IK zum Einsatz, um trotz der vielen Bewegungsfreiheitsgrade eines Zweiarmsystems schnell potentielle Lösungen ermitteln. Diese IK-Algorithmen kombinieren ein Gradientenabstiegsverfahren in der vorberechneten Erreichbarkeitsverteilung des Roboters mit der zufälligen Abtastung von freien Parametern. Diese randomisierte Bestimmung von IK-Lösungen wird zur Ermittlung von Ganzkörperkonfigurationen während der Planung von zweihändigen Greif- oder Umgreiftrajektorien eingesetzt.
Integrierte Greif- und Bewegungsplanung
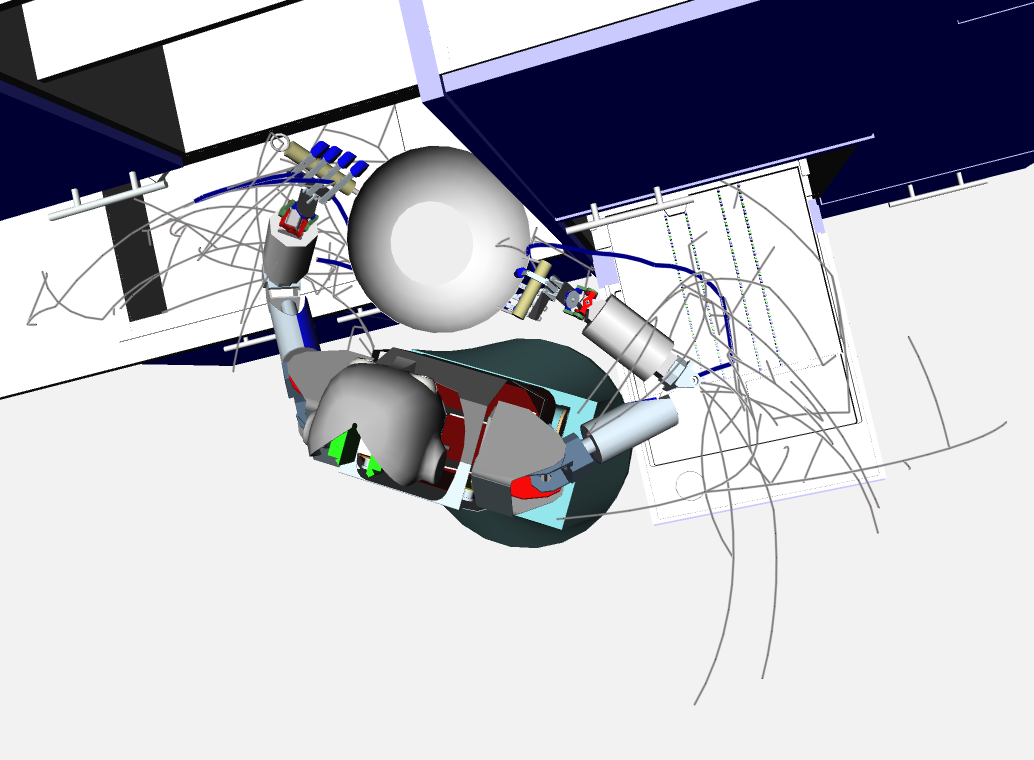
Der Grasp-RRT Planer vereint die Suche nach einem möglichen Griff mit der Suche nach einer kollisionsfreien Greiftrajektorie. Somit werden keinerlei vordefinierten Griffe benötigt und der Planer profitiert von einem größeren Zielraum. Während der Planung der Bewegung werden potentielle Greifhypothesen erzeugt, welche dann online mit einem Modul zur Ermittlung der Griffqualität bewertet werden. Wird ein stabiler Griff gefunden und kann die Greifhypothese kollisionsfrei mit dem RRT-Suchbaum verbunden werden, so ist eine Greiftrajektorie gefunden, mit der das Objekt stabil und kollisionsfrei gegriffen werden kann. Die Bewertung der Griffe wird durchgeführt, indem die einwirkenden Kräfte an den Kontaktpunkten über Reibungskegel approximiert werden und ein Gütemaß für die Griffqualität bestimmt wird.
Zweihändigen Greifaufgaben können mit dem Bimanual-Grasp-RRT geplant werden. Dieser Ansatz überwacht die seperate Ausführung von zwei Grasp-RRT Instanzen und bewertet potentielle Zweihandkombinationen. Hierzu wird die Bewertung zweihändiger Griffe durchgeführt und der Kollisionsstatus der zweiarmigen Bewegung bestimmt, um eine globale Lösung zu ermitteln.