
Master Motor Map
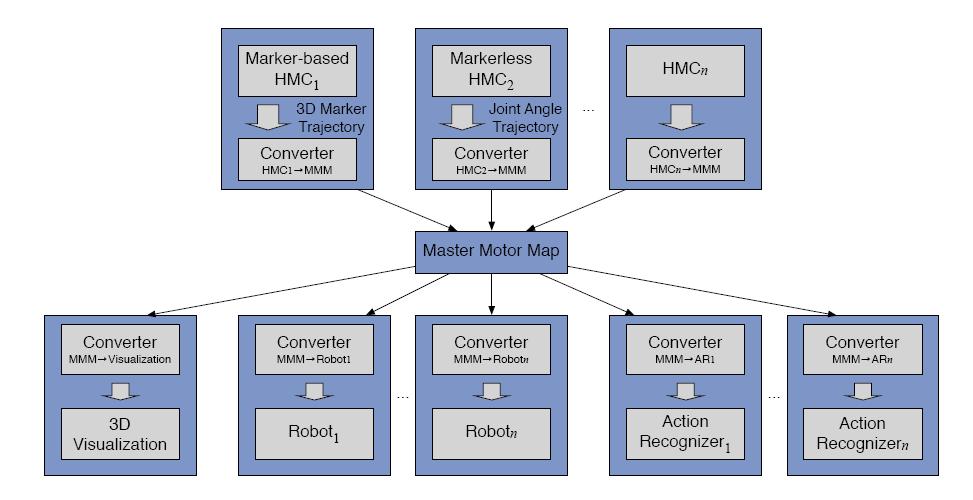
Master Motor Map (MMM) is a conceptual framework for perception, visualization, reproduction, and recognition of human motion in order to decouple motion capture data from further post-processing tasks, such as execution on a real humanoid robot. Employing MMM makes it easy to map motions between different kinematics independently and uniformly as well as to analyze certain dynamic aspects of the considered motion.
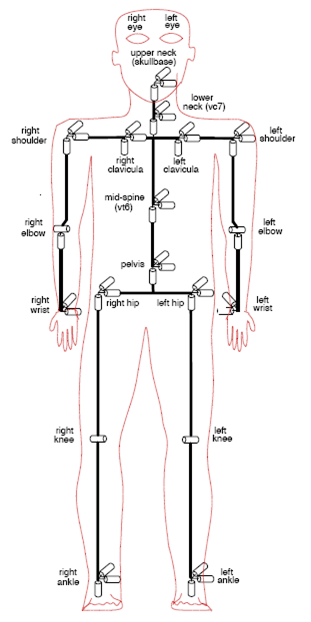
Part of this framework is a three-dimensional, dynamic model consisting of a particular kinematic structure enriched with pre-defined segment properties (anthropometric data) e.g. mass distribution, segment length, moment of inertia, etc. Moreover, the strategy is to define the maximum number of DoFs that might be used by any visualization, recognition, or reproduction module.
Further functionality can be easily added to MMM as modules to take additional aspects into consideration, such as the relative position between particular reference points to preserve the overall configuration of the motion.
MMM is intended to become a common standard in the robotics community to allow sharing different software modules and motion primitives as well as having common benchmarks.