
Research at H²T
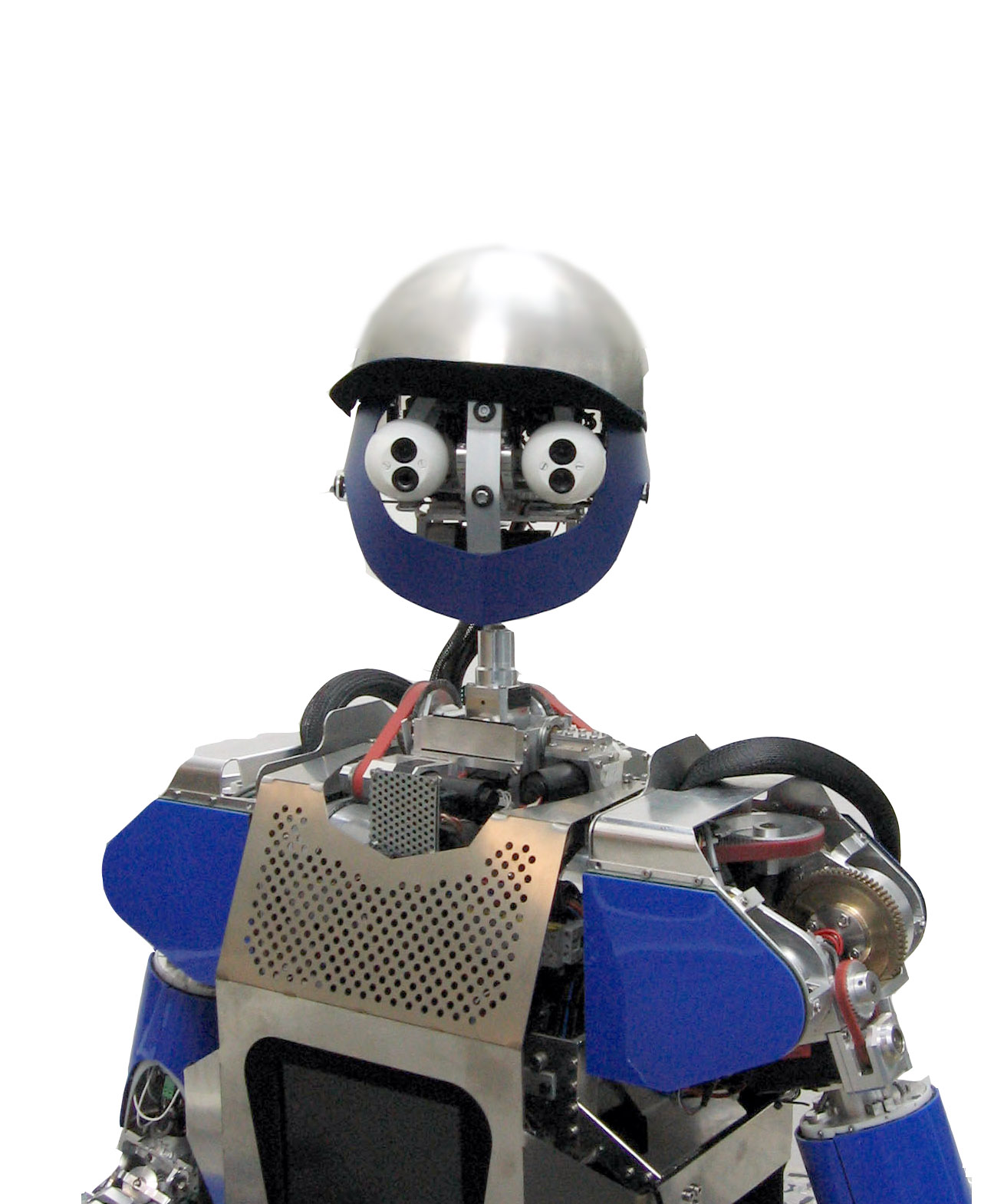
The development of cognitive robots relies on artificial embodiments having complex and rich perceptual and motor capabilities. This leads to humanoid robots as the most suitable experimental platform. While simpler robotic systems might be more suitable for testing some theories in simplified environments, only humanoid robots can provide rich sensorial inputs and complex actions necessary to develop higher cognitive processes. The design of such robots which are capable of developing perceptual, behavioural and cognitive categories in a measurable way and are capable of communicating and sharing these with humans and other artificial agents is a challenging task. The target system is supposed to interact with humans in a reliable and safe manner. In particular, it is meant to be able to cooperate and to enter a dialogue with them. Therefore it needs to understand both what it perceives and what it does.
Our research interest is the development of humanoid robots which safely coexist with humans, interactively communicate with humans and usefully manipulate objects in human-centered environments. In particular, we address the integration of motor, perception and cognition components such as multimodal human-humanoid interaction and cooperation in order to be able to demonstrate robot manipulation and grasping tasks.
Regardless of the application area, one of the common problems tackled in humanoid robotics research is the investigation towards understanding of human-like information processing and the underlying mechanisms of the human brain in dealing with the real world. Our hypothesis is that such understanding can only be attained if we consider the human in the loop.
To demonstrate the feasibility of our approach, we are building humanoid robot systems with complex and rich sensorimotor capabilities as the most suitable experimental platform for studying cognitive information processing. We present our recent work that combines various approaches and techniques toward the realization of fully integrated humanoid robots performing grasping and manipulation tasks in human-centered environments and real-world scenarios. We believe that a holistic approach is fundamental to achieve this goal. Therefore, we are investigating how different partial results, attained in sub-disciplines related to the development of humanoids, fit together to obtain complete processing models and integrative system architectures, and how to evaluate results at system level rather than focusing on the performance of component algorithms.
Main topics
 |
The H²T research group is engaged in the planning and mechatronic design of humanoid robots and the implementation of complex perceptual and motor skills. Mehr Informationen |
Projects
 |
The H²T research group is involved in projects of the German Research Foundation (DFG) and the EU. Mehr Informationen |
Publications
 |
The H²T research group is regularly represented at national and international congresses. Research results are also published in international journals. Mehr Informationen |