
Master Motor Map
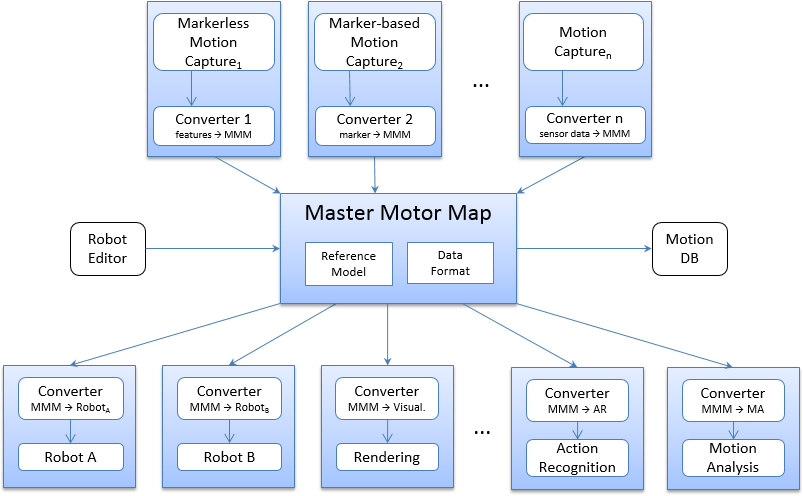
Master Motor Map (MMM) is a conceptual framework for perception, visualization, reproduction, and recognition of human motion in order to decouple motion capture data from further post-processing tasks, such as execution on a real humanoid robot. Employing MMM makes it easy to map motions between different kinematics independently and uniformly as well as to analyze certain dynamic aspects of the considered motion.
Part of this framework is a dynamic model consisting of a particular kinematic structure enriched with pre-defined segment properties (anthropometric data) such as mass distribution, segment length, moment of inertia, etc. Moreover, the strategy is to define the maximum number of DoFs that might be used by any visualization, recognition, or reproduction module.
Since August 2014, the MMM framework is open source software and licensed under the GNU General Public License version 3 (GPLv3).
The MMM framework is available on GitLab: MMMCore ![]() MMMTools
MMMTools ![]()
The documentation is available at mmm.humanoids.kit.edu.
The MMM framework is currently under active development. Contact Person: Tamim Asfour