
Motivation and Objectives
The execution of tasks requires the determination of collision-free trajectories of the robot in a fast and reliable way, taking into account a changing environment. Based on randomized algorithms, such as Rapidly Exploring Random Trees (RRT), we are developing algorithms for collision-free motion planning for single arm and bimanual grasping, re-grasping and manipulation tasks. In addition, we are investigating motion planners for grasping and manipulation tasks, which combines finding a feasible grasp, solving the inverse kinematics and searching the configuration space for collision-free trajectories.
Collision Detection and Motion Planning
A humanoid robot operating in a human-centered environment needs a component to plan collision-free motions in a fast and robust manner. Based on randomized algorithms, such as Rapidly Exploring Random Trees (RRT), specialized algorithms have been developed in order to serve a fast and accurate planning component. The planning algorithms are evaluated and integrated on Armar-III, a humanoid robot platform developed by the collaborative research center SFB 588.
Reduced 3D models of the robot and the environment are used by the high performance collision checking and distance calculation module and thus grasping and reaching motions can be planned efficiently with RRT-based methods.
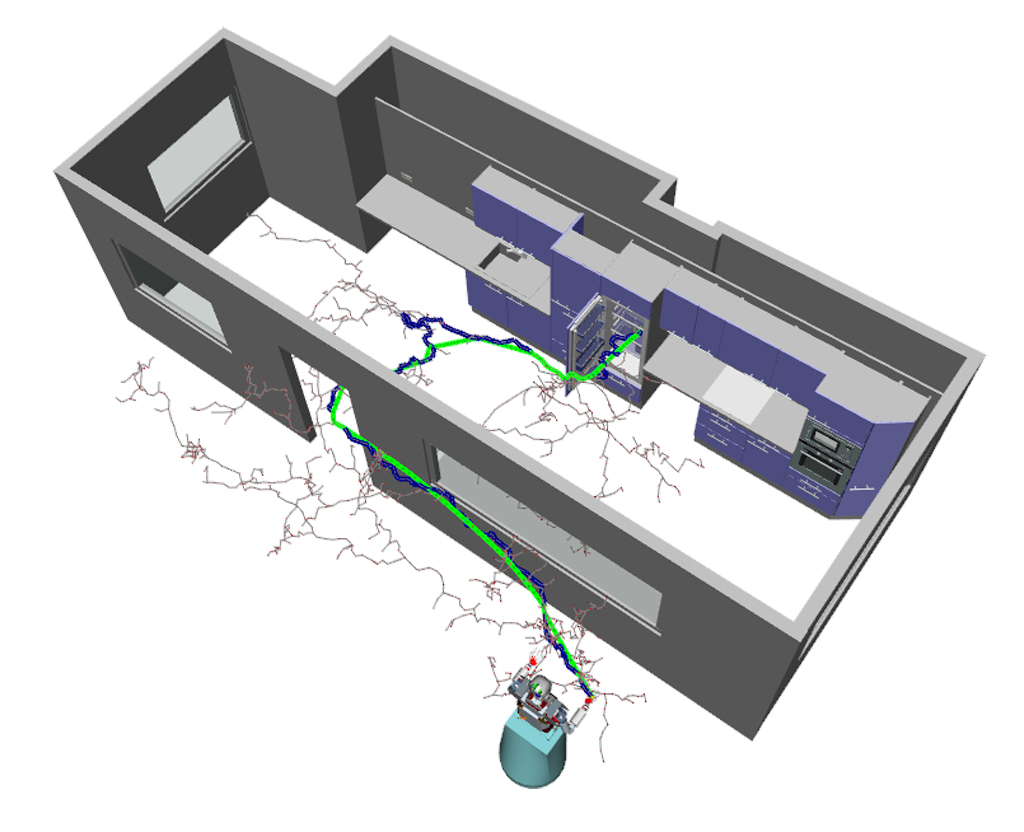
Guaranteed collision-free motions can be planned using lazy collision checking and enlarged robot models. Planning whole body motions for ARMAR-III is realized by the Adaptive RRT planner which quickly finds collision-free trajectories for 19 DoF of the subsystems Platform, Torso, Upperarm, Underarm, and Hand.
IK-RRT: Searching a goal during planning
A common task for a humanoid robot is to grasp an object and e.g. deliver it to another place. For such cases, a collision-free trajectory for grasping has to be planned which usually is done by solving the inverse kinematics and planning a trajectory to the configuration of the IK solution. Since there is no knowledge if there is a collision-free trajectory to the IK solution this approach may lead to a situation where no trajectory can be found by the planner, although a solution may exist. Furthermore a selection which grasp out of a set of feasible grasping poses should be used for grasping may limit the goal space additionally. To avoid the selection of a feasible grasp and an IK-solution we developed probabilistically complete planning approaches which combine the search for a collision-free trajectory with the search for a feasible grasp and an IK-solution. In case no IK-solver is present the J+-RRT approach can be used, in case an IK-solver is present, the planning can be done more efficiently by the IK-RRT algorithm.
In case both hands are available for grasping an object, the MultiEEF-Planner implicitly decides for which one a collision-free grasping trajectory exists by exploiting parallelized search algorithms and integrating the search for IK-solutions.
Planning Dual Arm Grasping and Re-Grasping Motions
If both arms of a humanoid robot are required for grasping, manipulating, or re-grasping tasks, an efficient planning component has to offer possibilities for planning dual-arm motions. Motion planning for such tasks on humanoid robots with a high number of degrees of freedom (DoF) requires computationally efficient approaches to determine the robot’s full joint configuration at a given grasping position, i.e. solving the Inverse Kinematics (IK) problem for one or both hands of the robot.
In this context, algorithms have been developed for solving the inverse kinematics problem by combining a gradient-descent approach in the robot’s pre-computed reachability space with random sampling of free parameters. This strategy provides feasible IK solutions at a low computation cost without resorting to iterative methods which could be trapped by joint-limits. This strategy is applied to dual-arm motion planning tasks in which the robot is holding an object with one hand in order to generate whole-body robot configurations suitable for grasping the object with both hands.
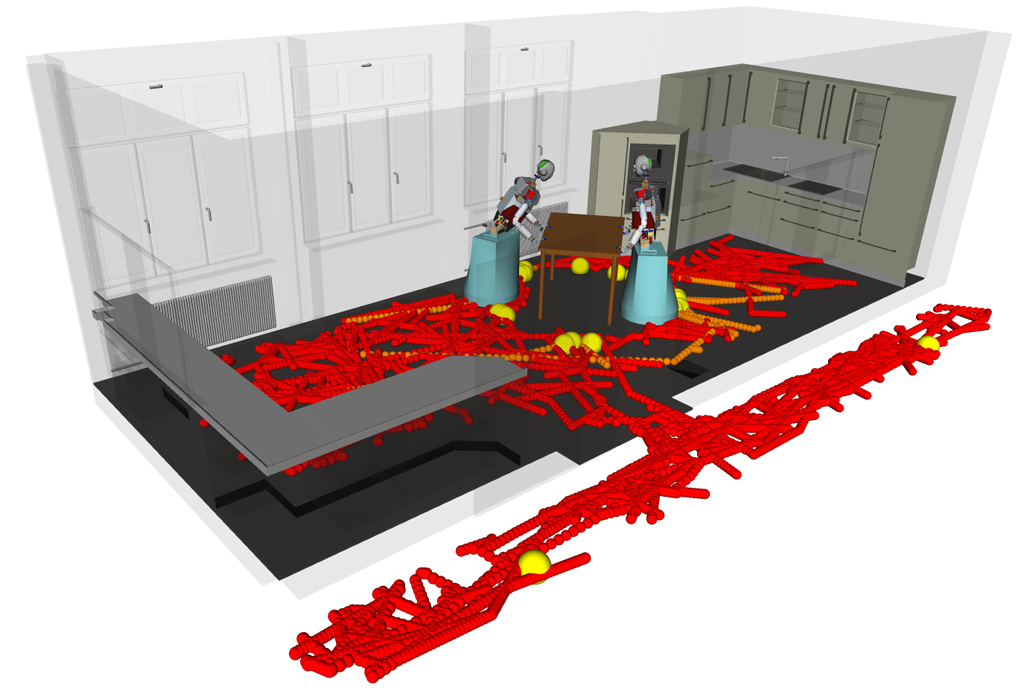
The two probabilistically complete RRT-based motion planning algorithms (J+-RRT and IK-RRT) interleave the search for an IK solution with the search for a collision-free trajectory. The dual-arm extension of these planners can be used for grasping an object with both arms or for solving re-grasping problems.
Integrated Grasp and Motion Planning
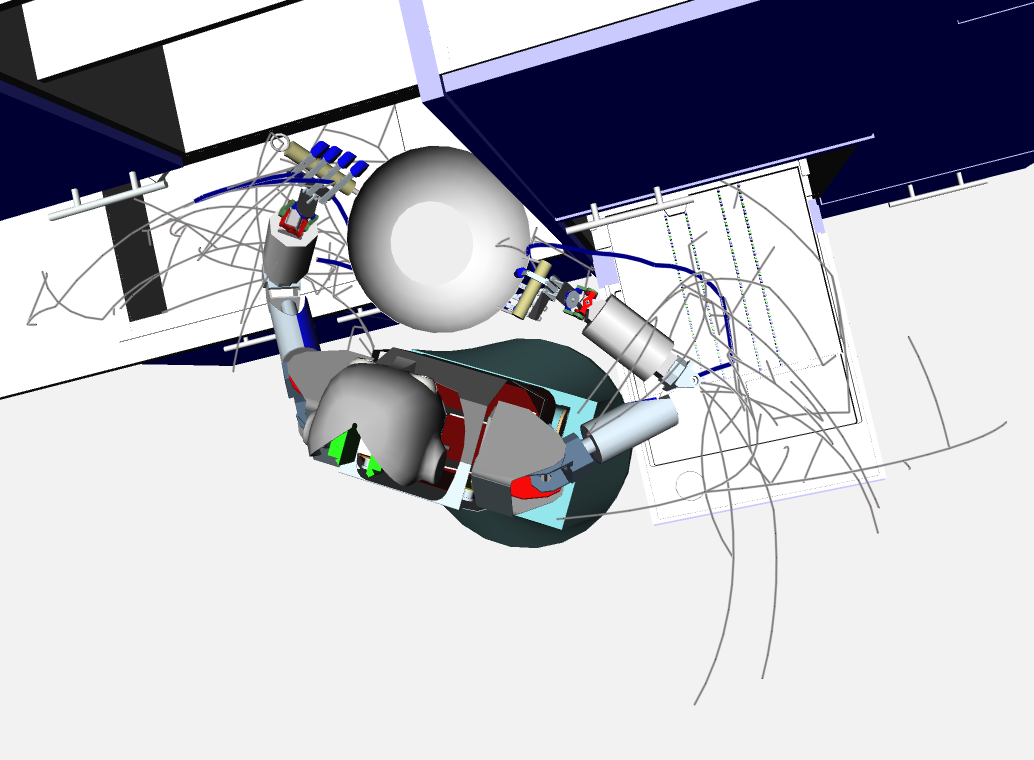
The Grasp-RRT planner integrates the search for a feasible grasping position and the search for a collision-free trajectory. Since no pre-defined grasping poses are needed, the planner benefits from a larger goal space for grasping. During planning the motion, grasping configurations are sampled and when a collision-free connection to the RRT can be found, the grasps are scored by a grasp quality algorithm based on the applied forces at the contact points. In case the score lies above a threshold, a grasping trajectory was found and the solution is pruned in order to generate a appealing trajectory.
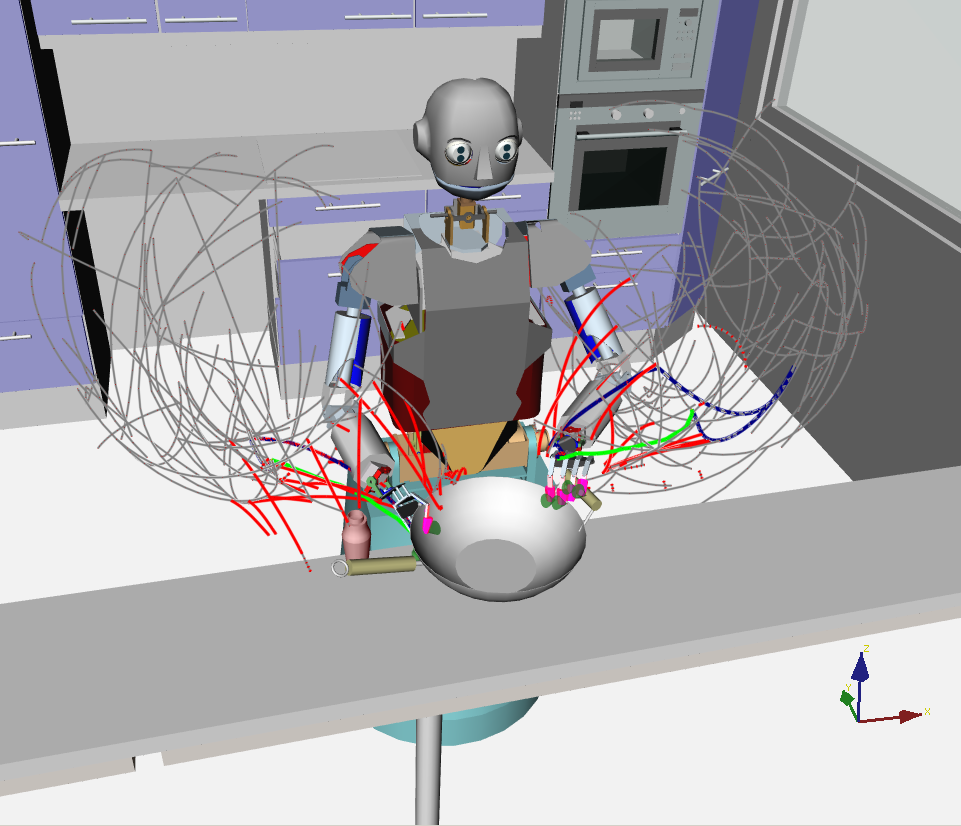
An extension to bimanual grasping problems is realized by the Bimanual Grasp-RRT algorithm. Here, two single arm Grasp-RRT planners (one for each arm) are started in parallel and a main thread collects all collision-free reachable grasping positions that are computed by the planners. By generating a bimanual grasp-score and checking self-collisions the main planning thread tries to find a global solution to a bimanual grasping position.