

Grasping with humanoid robots
Since our humanoid robots ARMAR-IIIa and ARMAR-IIIb operate in complex daily household environments, they have to deal with a variety of problems. One major challenge lies in grasping and manipulation of objects within the scene. Therefore, a sophisticated grasp planning strategy is essential, in order to guarantee collision-free and stable grasping of objects. A crucial component of grasp planning is the offline grasp analysis performed to find stable grasps by means of using a simulation environment.
Offline grasp analysis
Finding stable grasps on 3D objects is considered to be one of the hardest problems in robotics, since many parameters such as hand kinematics, object geometry, material properties and forces as well as obstacles in the environment have to be taken into account. This results in a high-dimensional space of possible grasps that cannot be searched exhaustively. A possible solution is grasp planning in simulation. This means that models of the robot hand and the object are loaded into a simulation environment in order to test various grasps on the object. The testing process is organized as follows. The robot hand is placed at different starting positions and orientations relative to the object. Then the hand approaches the object. Once collision between hand and object is detected, the fingers of the hand close until all finger links have contact with the object or cannot move any more. The coordinates of the contact points are used to calculate a grasp stability criterion. This way a multitude of different candidate grasps can be automatically tested and rated. However, collision detection and stability testing are computationally intensive. Considering the complexity of grasp planning, the heuristics used for generating starting positions and orientations of the hand are of major interest. In order to reduce the complexity of grasp planning it is necessary to find heuristics that maximize the fraction of stable grasps among the generated candidate grasps.
Exploiting an object's local symmetry properties to reduce the search space
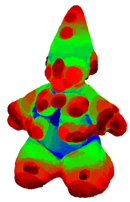
At the chair for High-Performance Humanoid Technologies, we investigate a grasp planning approach based on objects' symmetry properties. This approach uses an object representation based on the medial axis transform which means that an object is represented by inscribing interpenetrating spheres of maximum diameter.A sphere has maximum diameter if and only if it touches the object's surface at two or more distinct points.The union of these spheres' centers is called the medial axis (introduced in 1967 by H. Blum), and the medial axis combined with the sphere radii is called the medial axis transform.The medial axis transform is a complete shape descriptor, i.e. it can represent arbitrary three-dimensional shapes with arbitrary precision.Using principal component analysis, it is easily possible to extract candidate grasps from the inscribed spheres' centers which consist of an approach point, an approach vector for the hand and a hand orientation.
The basic idea is to exploit the opposition principle known from Thea Iberall's grasp taxonomy (1986) and to grasp objects based on their local symmetry properties which are part of the medial axis.If a part of an object contains a local symmetry plane, then the object should be grasped in such a way that thethumb touches the object's surface at one side of the local symmetry plane and the other fingers touch the object at the opposing side of the local symmetry plane.Consequently, the object (or more specifically, the considered sphere) is squeezed between the fingers. If a part of an object contains a local symmetry axis, then the object should be grasped in such a way that the thumb and the fingers wrap around the local symmetry axis. Apart from that, the sphere diameter gives a hint about the object's local thickness.This is very useful, as the grasp planner can avoid to generate and test candidate grasps for parts of the object that are too big to be grasped with the robot's hand.
In summary, this approach allows to exploit the shape of objects for grasp planning in order to reduce the complexity of the search space, while at the same time not sacrificing geometrically meaningful candidate grasps due to poor object geometry approximation. Thus, the grasp planning algorithm often yields a higher percentage of force-closure grasps than other methods based on simpler heuristics. The approach also disproves the prevailing opinion of the last decade which suggested that object geometry is too difficult to analyze and that grasps should rather be planned by spending considerable amounts of computation time to test almost randomly generated candidate grasps. Instead, our approach shows that, given a suitable way to deal with the geometry, the grasp planning algorithm itself becomes simple and elegant.
For further details, we refer the interested reader to our publications at the IROS 2010, IROS 2011 and Humanoids 2012 conferences which are listed on the publications pages of the author and our research group.