Object Recognition and Localization


Object recognition and 6-DoF pose estimation is one of the most important perceptive capabilities of humanoid robots. Accurate pose estimation of recognized objects is a prerequisite for object manipulation, grasp planning, and motion planning - as well as execution. Our research focusses on developing real-time methods for object recognition and in particular accurate pose estimation for these applications, using the stereo camera system of typical humanoid robot heads with a baseline comparable to human eye distance.
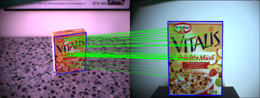
The listed publications deal with two different classes of objects: textured objects and single-colored objects. For the first class of objects, an approach based on local features is used, incorporating our developed high-speed features as a combination of the Harris corner detector and the SIFT descriptor. The developed approach for the second class of objects combines appearance-based view matching, stereo triangulation and 3D object model information. In both cases, special emphasis is put on accurate stereo-based 6-DoF pose estimation. With these systems we can capture 6-DoF object trajectories at frame rates of up to 23 Hz (textured objects) and up to 50 Hz (single-colored objects) using conventional hardware.