
Self-Exploration and Body Schema
Calibration and Tools
With increasingly complex robots, especially humanoids, the calibration process of the arms and other kinematic chains, and hence the prediction of the effects of joint movements, becomes a difficult, time-consuming and often expensive task. This process has to be repeated every time the tool center point of the robot changes, e.g. if the robot accidently suffers from deformation or, even more important, if the robot intends to interact with its environment with a tool.
Self-Exploration and the Body Schema
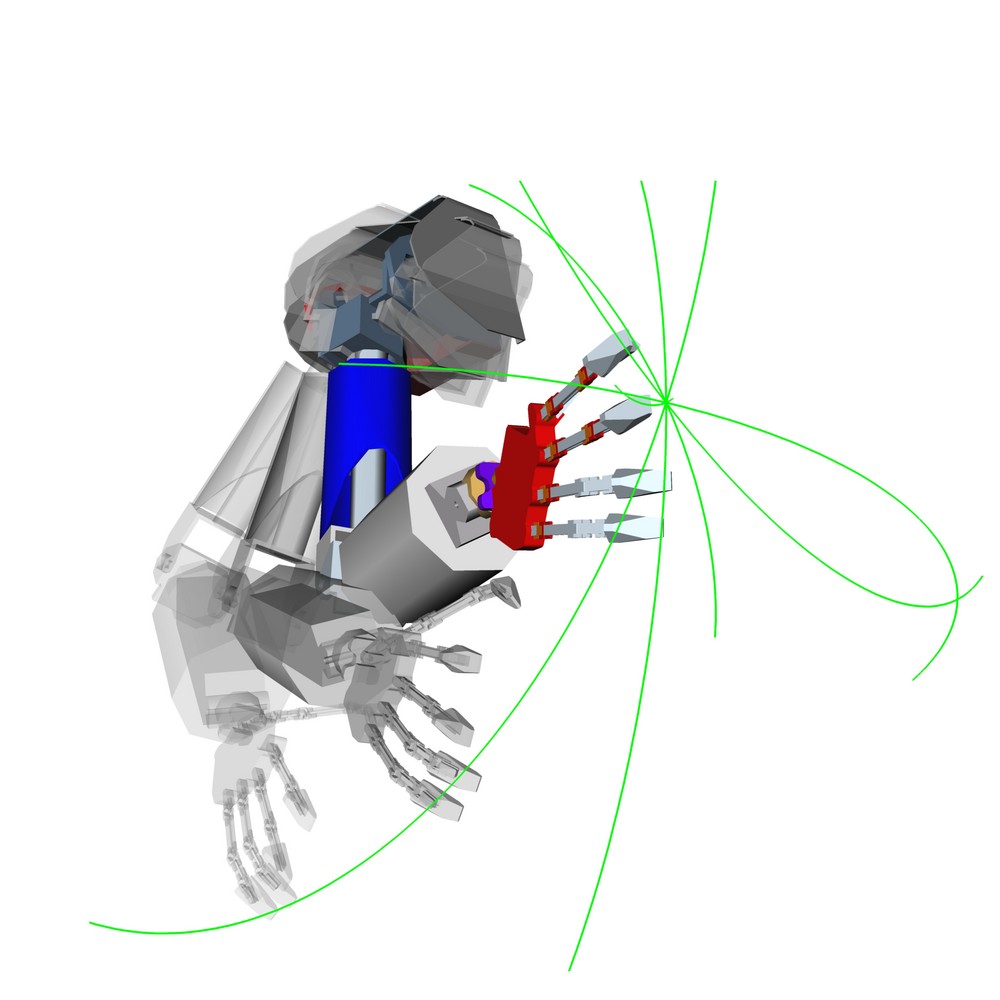
The hand-eye calibration by traditional means becomes nearly impossible. Humans solve the problem successfully by pure self-exploration, which has led to the adaptation of biologically-inspired mechanisms to the field of robotics. In neuroscience, it is common knowledge that there exists a body schema that correlates proprioceptive sensor information, e.g. joint configurations, with the visible shape of the body. It also represents an unconscious awareness of the current body state.
Learning of the Body Schema
From a technical point of view, the main difficulty of the approximation of the body schema lies in the fact that it is a highly non-linear function with non-redundant input variables, each of them significantly influencing the result. Hence, it requires a large amount of training experiences that grows exponentially with the number of degrees of freedom of the kinematic chain. This number of training experiences can be kept as small as possible by introducing a-priori knowledge.
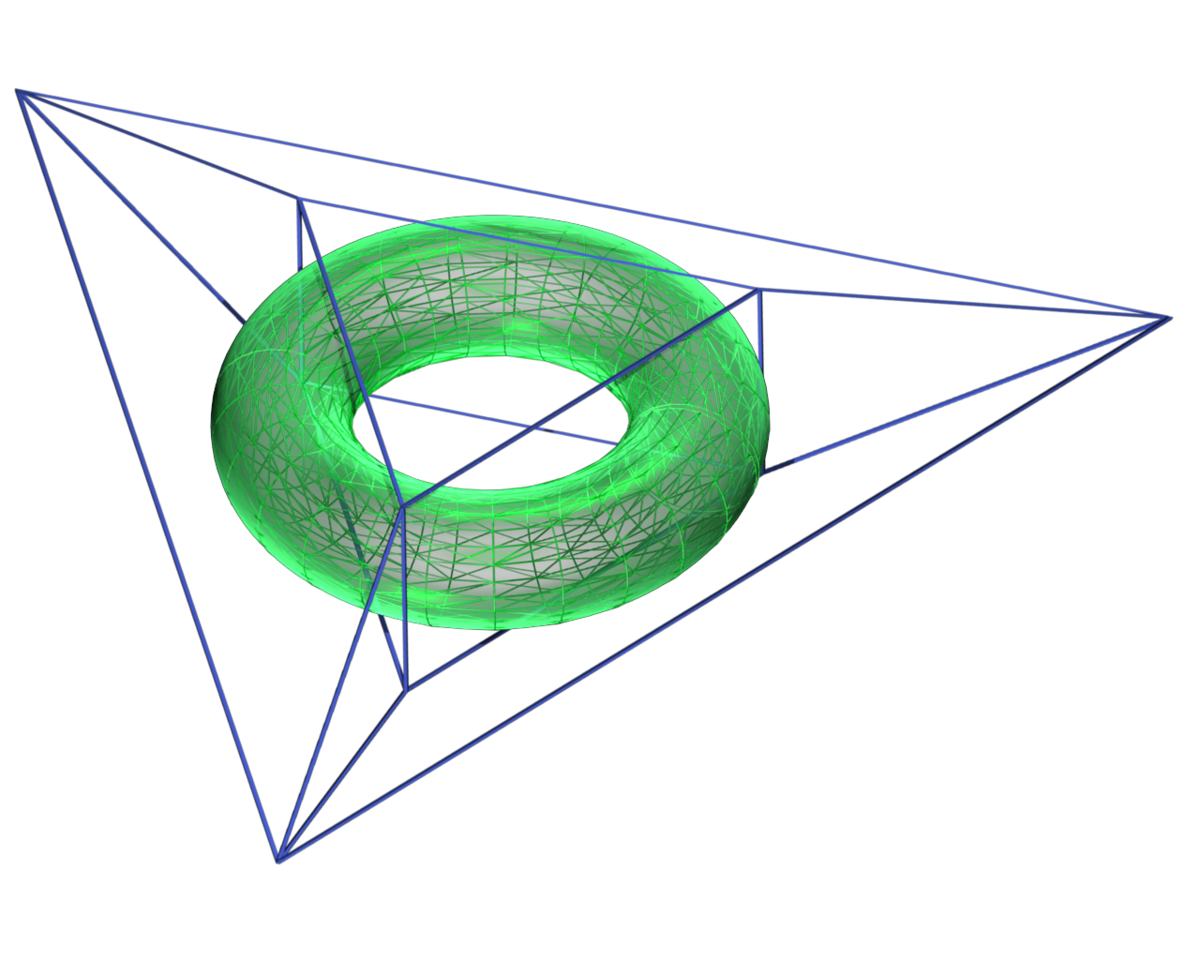
We developed a learning method that is specialized to the non-linearity of kinematics. It makes extensive use of techniques borrowed from the field of computer-aided geometry. The Kinematic Bézier Maps (KB-Maps) permit reducing the complex problem of learning to a linearly-solvable, although high-dimensional, one. Together with decomposition techniques it is possible to create an adaptive body schema of a humanoid robot.