
Robot hands and hand prosthetics
Inspired by the intelligent mechanism of the TUAT/Karlsruhe Hand, we develop a wide range of underactuated, humanoid hands for robotic and prosthetic acpplications. Besides the mechanical adaptivity also the high integration and sensorisation are in the focus of our development. Combined with the anthropomorphic form and kinematics this causes the comprehensive grasping capabilities and versatility of our hands.
The TUAT/Karlsruhe Humanoid Hand
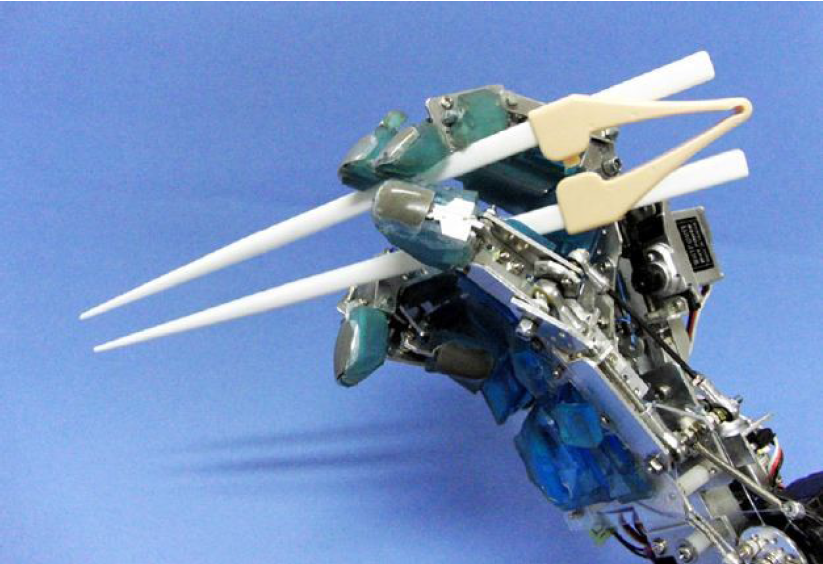
The first version of the TUAT/Karlsruhe Humanoid Hand has been developed in the year 2000 and possesses 20 DOF. It is driven by one actuator which can be placed into or around the hand. The second version, developed in 2013, is equipped with 24 DoF and additional actuators allowing to perform more complex grasping and manipulation tasks
KIT ARMAR Hand

For the operation in human centred environments, our robot ARMAR-6 is equipped with two five-fingered hands. The anthropomorphic shape and kinematics based on human proportions allow manipulation of different tools and other manmade objects. Each of the 14 finger joints (two in the thumb and three per finger) is supported by ball bearings and actuated by a tendon.
Similar to the KIT Prosthetic Hand, fingers and thumb are actuated by one motor respectively. The torque distribution via an adaptive underactuation mechanism allows joints and fingers to close even if other joints or fingers are blocked. The robotic hand is sized 30% larger than the 50th percentile of male hands to allow for increased, stronger motors.
As the hands are used in maintenance tasks involving heavy objects, they have to be robust and light at the same time. Hence most of the structural hand parts are 3D printed. All cables are hidden in the interior of the hand to avoid electric failures. The hand itself is covered by a protective glove.
KIT Prosthetic Hand

The development and control of prosthetic hands requires holistic integration and a comprehensible user interface. With the KIT Prosthetic Hand we develop novel, five-fingered, 3D printed hand prostheses with an underactuated mechanism, sensors and an embedded control system.
The hand mechanics is based on the underactuated TUAT/Karlsruhe mechanism with two motors actuating 10 degrees of freedom. The realization in 3D printing technologies facilitates a personalization of the prosthetic hand in terms of size and kinematic parameters. By now two versions of the KIT Prosthetic Hand sized as a 50th percentile male and female hand are developed.
The hand integrates an advanced embedded system as well as an RGB camera in the base of the palm and a colour display in the back of the hand. It has a cylindrical grasp force of 24.2 N, a hook grasp force of 120 N and a hand closing time of 1.3 s.