
The Robots of H²T
In designing our humanoid robots, we desire a humanoid that closely mimics the sensory and sensorimotor capabilities of the human. The robot should be able to deal with a household environment and the wide variety of objects and activities encountered in it.
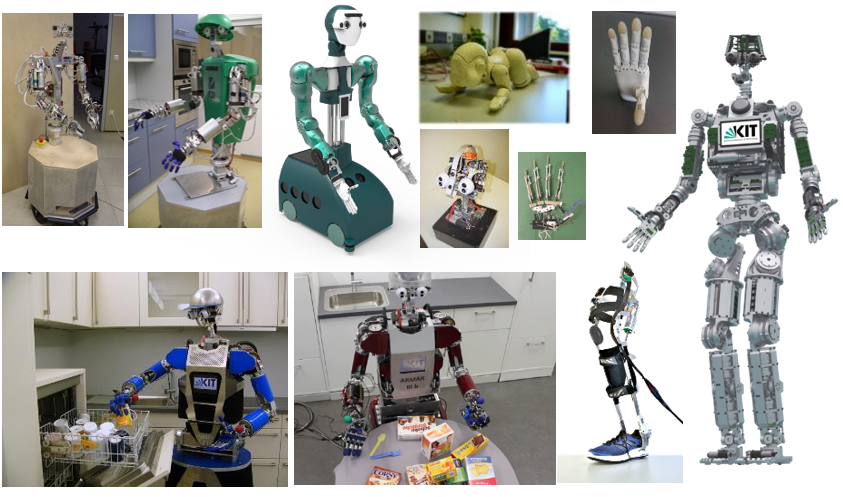
Since 1999, we have been building autonomous humanoid robots under a comprehensive view so that a wide range of tasks (and not only a particular task) can be performed. Robots of the ARMAR series (ARMAR-I, ARMAR-II, ARMAR-IIIa and ARMAR-IIIb) have been built to support grasping and dexterous manipulation, learning from human observation and natural human-robot interaction.
The research activities in this area include the specification and design of humanoid components, the development of dedicated hardware for sensory data processing and motor control as well as the design of software frameworks, which allow for the integration in humanoid robots that are in rich in sensory and motor capabilities.