Objekterkennung und -lageschätzung


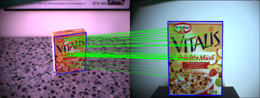
Die unten aufgeführten Publikationen beschäftigen sich mit zwei unterschiedlichen Klassen von Objekten: texturierten Objekten und einfarbigen Objekten. Für die erstgenannte Klasse wird ein Ansatz basierend auf lokalen Merkmalen verwendet, welcher die von uns entwickelten sehr schnell zu berechnenden Merkmale einsetzt, eine Kombination aus dem Harris Eckendetektor und dem SIFT-Deskriptor. Der entwickelte Ansatz für die zweite Klasse kombiniert ansichtsbasiertes Matching von Ansichten, Stereo-Triangulation und Information aus einem 3D-Objektmodell. In beiden Fällen wird besonderer Wert auf exakte Stereo-basierte 6 DoF Lageschätzung gelegt. Mit diesen beiden Systemen können 6 DoF Objekttrajektorien bei Bildwiederholraten von bis zu 23 Hz (texturierte Objekte) und bis zu 50 Hz (einfarbige Objekte) unter Verwendung herkömmlicher Hardware erfasst werden