Praxis der Softwareentwicklung (PSE) (nach Absprache)
- Typ: Vorlesung (V)
-
Lehrstuhl:
KIT-Fakultäten - KIT-Fakultät für Informatik
KIT-Fakultäten - KIT-Fakultät für Informatik - Institut für Programmstrukturen und Datenorganisation - IPD Snelting - Semester: SS 2024
-
Zeit:
Mo. 15.04.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 22.04.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 29.04.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 06.05.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 13.05.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 27.05.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 03.06.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 10.06.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 17.06.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 24.06.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 01.07.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 08.07.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 15.07.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
Mo. 22.07.2024
15:45 - 17:15, wöchentlich
50.34 Raum -118
50.34 INFORMATIK, Kollegiengebäude am Fasanengarten (1. Untergeschoss)
- Dozent: Dr.-Ing. Erik Burger
- SWS: 4
- LVNr.: 2400150
- Hinweis: Präsenz
| Vortragssprache | Deutsch |
| Organisatorisches | nach Absprache |
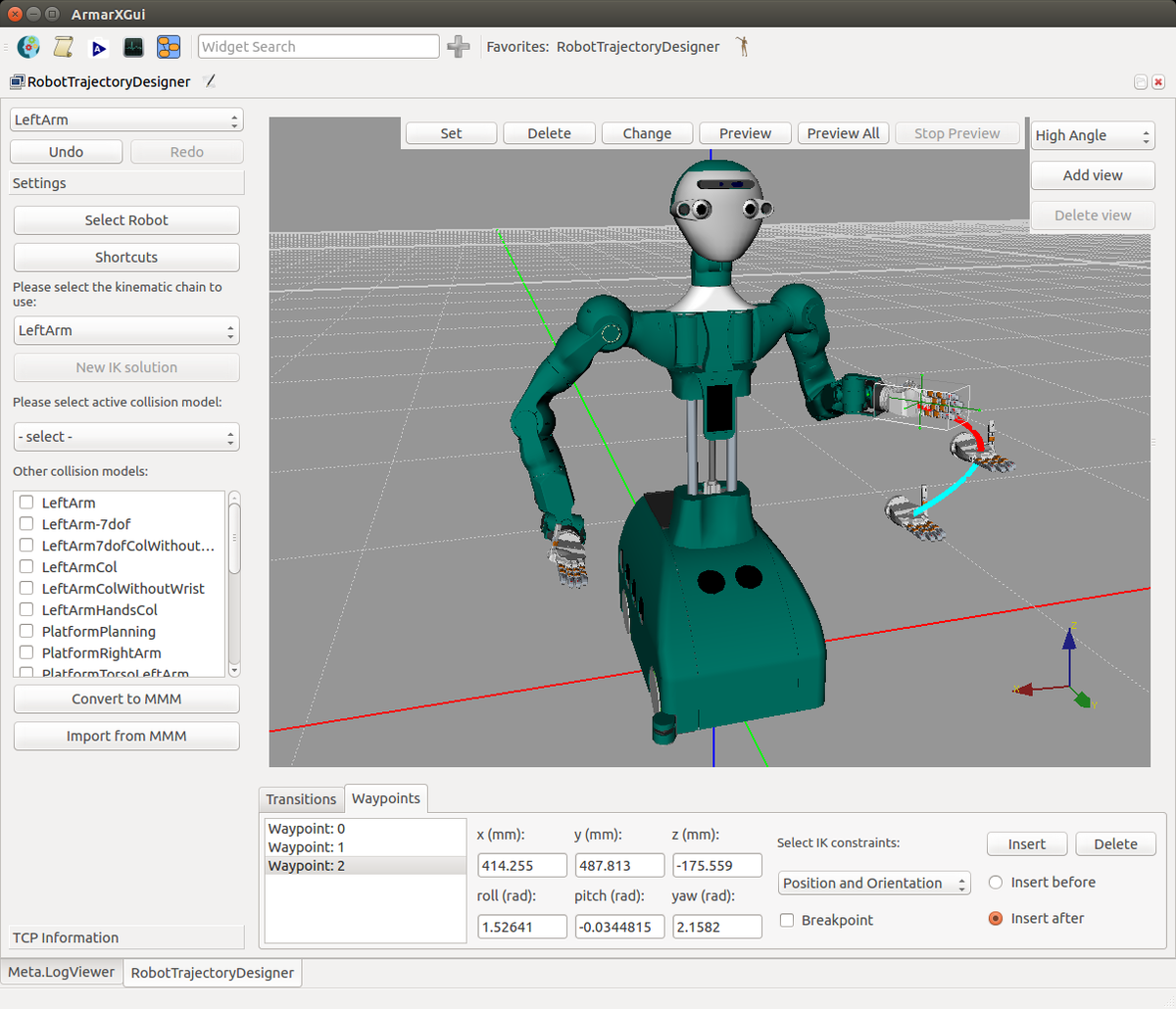
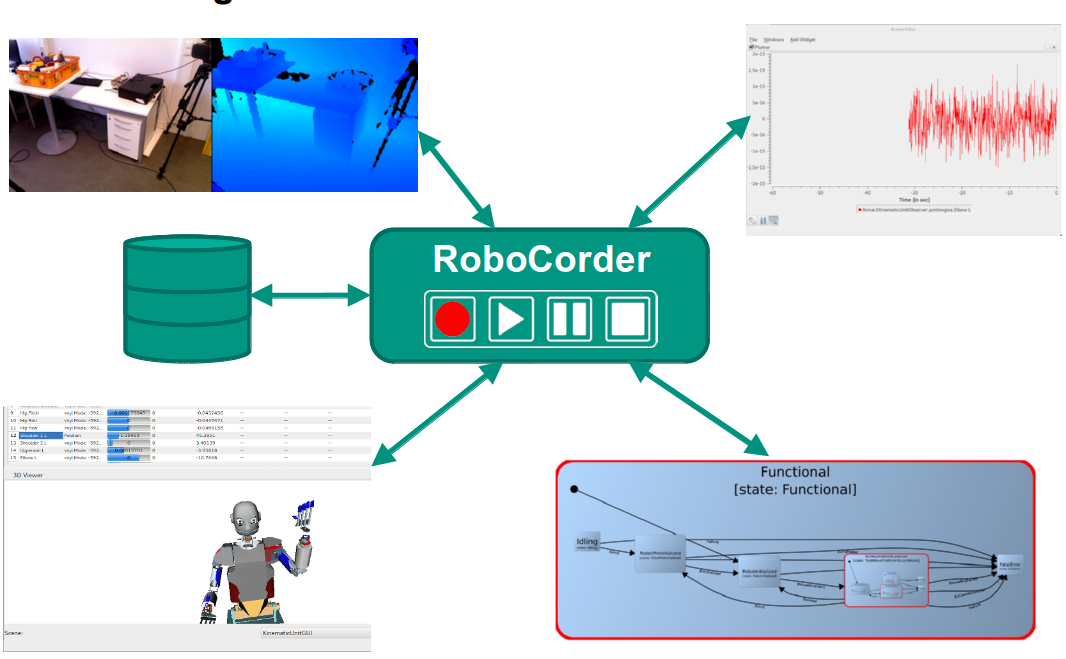
Im Rahmen der Lehrverstanstaltung Praxis der Softwareenwicklung (PSE) wird für gewöhnlich jedes Semester am H2T ein Thema angeboten, das Softwareentcklung im Rahmen der Robotik behandelt.
Diese Themen reichen von intuitiver Steuerung des Roboters mittels Android-Tablets über 3D-Trajektoriendesigner bis zur Anomaliedetektion in den Sensoren des Roboters.
Genauere Informationen zu PSE und welches Thema für das aktuelle Semester angeboten wird, können auf der Hauptseite von PSE beim Lehrstuhl von Prof. Snelting abgerufen werden.